Download
1 / 20
200 likes | 413 Vues
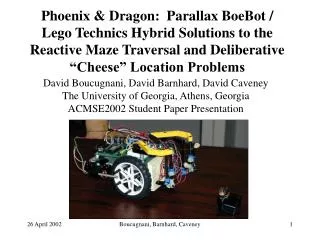
Phoenix & Dragon: Parallax BoeBot / Lego Technics Hybrid Solutions to the Reactive Maze Traversal and Deliberative “Cheese” Location Problems. David Boucugnani, David Barnhard, David Caveney The University of Georgia, Athens, Georgia ACMSE2002 Student Paper Presentation. Outline.

E N D
Phoenix & Dragon: Parallax BoeBot / Lego Technics Hybrid Solutions to the Reactive Maze Traversal and Deliberative “Cheese” Location Problems David Boucugnani, David Barnhard, David Caveney The University of Georgia, Athens, Georgia ACMSE2002 Student Paper Presentation Boucugnani, Barnhard, Caveney
Outline • 3 minute preview / review of important robotic concepts • The Phoenix • Sensing and other hardware components • Programming Pearls • Results of reactive maze traversal • The Dragon • Additional sensory modifications • The problem of absolute positioning • Results of “cheese” location problem • Problems / Future Directions Boucugnani, Barnhard, Caveney
3 minute preview/review of robotics • What is robotics? • “A reprogrammable, multifunctional manipulator designed to move material parts, tools or specialized devices through various programmed motions for the performance of various tasks.” Robotics Institute of America, 1979 • “An automatic device that performs functions normally ascribed to humans or a machine in the form of a human.” Webster • Definitions we like better: • “Force Through Intelligence” • “Where AI Meets the Real World” Boucugnani, Barnhard, Caveney
Robotic Design Methodologies • Two methodologies for an approach to robotics: • mechanical and electrical engineering approach • software and behavioral approach • Autonomous robots can exhibit several different types of behavior or control schemes, two of which include: • reactive control • deliberative control Boucugnani, Barnhard, Caveney
Reactive Control Architecture • “Don’t think, (re)act” • Tight coupling of sensors and actuators • Reacts immediately to its environment • Does not store any information (i.e., does not form an ontology of the outside world) • Examples from nature: • Trigger hairs on Venus fly traps • Ants defending a nest Boucugnani, Barnhard, Caveney
Deliberative Control Architecture • “Think hard, then act” • “Deliberates” on next action to perform based on previous and current sensory input • Requires an ontology or world representation • A method of remembering previous sensory states • World Modeling • Can range from the very simple (keeping track of position) to very complex (building complex maps of large environments) Boucugnani, Barnhard, Caveney
The Phoenix - Introduction • An exercise in trial and error • Overall employs the reactive control architecture to traverse a maze • Some deliberative components • Counts alternating touch sensor hits to detect corners (in original version) • Exploits randomization to defeat looping behavior Boucugnani, Barnhard, Caveney
Phoenix Evolution Boucugnani, Barnhard, Caveney
The Phoenix – Sensing and Structure • Original version had two front touch sensors • Replaced with binary IR sensors and one dead-ahead, loop touch sensor • Variable distance trigger based on software-set IR frequency • Utilized Lego Technics parts for sensor mounting platform • Breadboard attached to front for additional wiring space Boucugnani, Barnhard, Caveney
Unpublished – One-bit Whisker Assembly Figure 2.3.1 – IR Hanger Figure 2.2 Figure 2.1 – Rubber Band Gripping Ends for Whiskers Phoenix Figures Boucugnani, Barnhard, Caveney
Phoenix Programming Pearls • All programming in P-Basic, a subset of Basic • Employs bit-by-bit variable encoding to conserve register space • Short and long range IR sensor sweeping • Yields a rough estimate of object distance • Can be utilized to detect wall openings in wide corridors • Smart turning • Determines best direction to turn if front touch sensor is triggered • Based on frontal IR sensor values Boucugnani, Barnhard, Caveney
Reactive Maze Traversal Results • The Phoenix was able to successfully traverse several simple mazes • Traversal time was dependent on turn choices (the luck of the randomizer) • Able to avoid all obstacles within range of the IR sensors Boucugnani, Barnhard, Caveney
The Dragon – Sensory and Structural Modifications • The Dragon (in the physical sense) is a direct descendent (mutation) of the Phoenix • Twin photoresistors to detect the “cheese”, set at a 3 inch trigger range to eliminate “homing” behavior • “Ben Hur Chariot Spikes” with spring-and-loop touch sensors to count steps taken Boucugnani, Barnhard, Caveney
Unpublished – Spring-Loop Sensor assembly Figure 3.1 – Touch Sensor / WheelProjection Combination assembly Figure 3.2 – Photoresistor / IR Hanger Dragon Figures Unpublished – Failed Break Beam Sensor Boucugnani, Barnhard, Caveney
The Absolute Positioning Problem • Positioning is crucial in any search and retrieve problem • Possible solutions include: • GPS • Overhead camera • Triangulation based on tower emitters positioned around the site • However, these solutions require a connection to an outside sensor and/or computer, which is not in the spirit of autonomous robotics Boucugnani, Barnhard, Caveney
Dragon’s Positioning Solution • Keep track of direction facing • Count number of steps taken in this direction via “Ben Hur Chariot Spikes” • Use trigonometry to convert resulting vector into vertical (and horizontal) components Boucugnani, Barnhard, Caveney
Cheese-Finding Results • The Dragon can • search for the cheese (light source) • record its vertical position • return to the starting position • recall the vertical position and move to the cheese’s location, searching along the horizontal if necessary • avoid obstacles at each stage • All with 2K of program / data space and 32 bytes of register space! Boucugnani, Barnhard, Caveney
Problems / Future Directions • P-Basic too simple, lacks many convenient programming structures • Need more memory to fully implement absolute positioning • Would like to use a symbolic programming language (Prolog) for a more abstract and complex knowledge / ontological representation • We will be moving to other platforms (Palm, Laptop) to implement robots with more complex behaviors, but still retain autonomousness Boucugnani, Barnhard, Caveney
Code and Presentation on Web The source code for this project as well as HTML and Power Point versions of this presentation can be found online at: ais.ai.uga.edu/boucugnani/robotics Boucugnani, Barnhard, Caveney
Questions? Boucugnani, Barnhard, Caveney