Download
1 / 117
1.17k likes | 1.3k Vues
Athanasios Kehagias Aristotle University of Thessaloniki (and Geoffrey A. Hollinger, Univ. of S. California). Robotic Pursue Evasion and Graph Search. Robotic Pursuit Evasion And Graph Search. What will we talk about?. Graph Search (GS): everybody knows it

E N D
Athanasios Kehagias Aristotle University of Thessaloniki (and Geoffrey A. Hollinger, Univ. of S. California) Robotic Pursue Evasionand Graph Search Robotic Pursuit Evasion And Graph Search
What will we talk about? • Graph Search (GS): everybody knows it • Robotic Pursuit Evasion (PE): auro10_2.mp4 (from G. Hollinger’s thesis, CMU Robotics Institute) 2
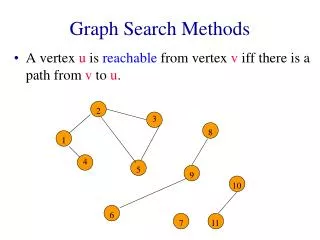
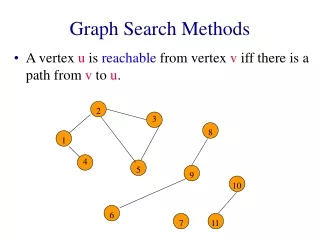
Graph Search • Mostly invisible evader (Parsons) • Very little about visible evader (Nowakowski) 3
Robotic Pursuit Evasion Video: auro10_2.mp4 • Indoor environment / floorplan • Three pursuers • Dirty set • Node search 4
Applications of Robotic Search / PE • Military • Search and Rescue • Tracking • Elderly care • Robotic exploration of hazardous sites • Computer games 5
Plan of the talk • Historical review (1940-2010) • Models, algorithms, experiments, theorems • “Dimensions” of the PE problem • Desiderata • Questions • Discussion 6
Timeline 7
Prehistory • The search problem in Operations Research (Koopman, 1942) • PE and Differential Games (R. Isaacs, 1955) • PE and Markov Decision Processes (Eaton and Zadeh, 1962) 8
Operations Research • Probabilistic problem • Continuous geometry (can also be discrete) 9
Koopman, B.O., “The theory of search. III. The optimum distribution of searching effort”, Operations Research, vol. 5, pp.613--626, 1957. • Koopman, B.O., Search and screening: general principles with historical applications, 1980. • Dobbie, J.M., “A survey of search theory”, Operations Research, vol. 16, pp. 525--537, 1968. • Benkoski, S.J. and Monticino, M.G. and Weisinger, J.R., “A survey of the search theory literature”, Naval Research Logistics, vol. 38, pp. 469--494, 1991 • Washburn, A.R., “Branch and bound methods for a search problem”, Naval Research Logistics, vol. 45, pp. 243--257, 1998 • Champagne, L. and Carl, EG and Hill, R., “Search theory, agent-based simulation, and u-boats in the bay of Biscay”, Simulation Conference, 2003, vol.1, pp. 991--998, 2004. 10
PE and Differential Games • Continuous environment • x(t), y(t) positions of pursuer and evader • u(t), v(t) control functions of pursuer and evader • Pursuer’s gain: • Evader’s gain: 11
R. Isaacs, Differential Games, Wiley, 1965 • Vidal, R. and Shakernia, O. and Kim, H.J. and Shim, D.H. and Sastry, S. “Probabilistic pursuit-evasion games: theory, implementation, and experimental evaluation”, IEEE Trans. on Robotics and Automation, vol.18, pp. 662--669, 2002. • Li, D. and Cruz, JB and Chen, G. and Kwan, C. and Chang, M.H., “A hierarchical approach to multi-player pursuit-evasion differential games”, CDC-ECC'05, pp. 5674--5679, 2006. • Cao, H. and Ertin, E. and Kulathumani, V. and Sridharan, M. and Arora, A., “Differential games in large-scale sensor-actuator networks”, IPSN 2006, pp. 77--84, 2006. • Schenato, L. and Oh, S. and Sastry, S. and Bose, P., “Swarm coordination for pursuit evasion games using sensor networks”, ICRA 2005, pp. 2493--2498, 2006. • Bopardikar, S.D. and Bullo, F. and Hespanha, J.P., “On discrete-time pursuit-evasion games with sensing limitations”, IEEE Trans. on Robotics and Automation, vol. 24, pp.1429--1439, 2008 12
Markov Decision Processes (MDP) • Discrete environment: a graph G=(V,E) • x(t): position of the pursuer • y(t): position of the evader • Evader is a Markov chain: with i,j in V • Pursuer chooses his position: • Joint state: z(t)=(x(t), y(t)) follows a “controlled” MC: 13
Markov Decision Processes • Goal: choose u(t) to reach a state (i,i) • If the evader is visible we have full knowledge of z(t)=(x(t), y(t)) and it is a Markov Decision Process (MDP) • If the evader is invisible we have partial knowledge of z(t)=(x(t), y(t)) and it is a Partially Observable Markov Decision Process (POMDP) 14
Eaton, JH and Zadeh, LA , Optimal Pursuit Strategies in Discrete-State Probabilistic Systems, ASME Transactions, Series D, Journal of Basic Engineering, vol. 84, 1962. • Hsu, D. and Lee, W.S. and Rong, N., A point-based POMDP planner for target tracking, ICRA 2008, pp. 1050-4729, 2008. • Miller, S.A. and Harris, Z.A. and Chong, E.K.P., “A POMDP framework for coordinated guidance of autonomous UAVs for multitarget tracking”, EURASIP Journal on Advances in Signal Processing, 2009. • Hutchinson, S.A. et al., “Game-Theoretic Analysis of a Visibility Based Pursuit-Evasion Game in the Presence of Obstacles”. ACC'09, pp. 373--378, 2009. • Basar, T., “Pursuit-evasion games in mobile networks, Ph.D. Thesis, 2010. 15
Flashlight Search • Two non-robotic papers • Sugihara, K. and Suzuki, I. and Yamashita, M., “The searchlight scheduling problem”, SIAM Journal on Computing, vol.19, pp. 1024, 1990. • Suzuki, I. and Yamashita, M., “Searching for a mobile intruder in a polygonal region”, SIAM Journal on computing, vol. 21, pp.863, 1992. • They are in the Art Gallery tradition • They have implicitly influenced the robotics literature 16
The searchlight scheduling problem • the searchers are stationary • they search by flashlight (a ray) • the direction of the flashlight can be changed continuously. • This paper does not cite the GS literature 17
A single mobile searcher • Searcher can have different degrees of visibility • a searcher with k flashlights whose visibility is limited to k rays emanating from his position (k-searcher) • a searcher with a point light source who can see in all directions simultaneously (-searcher). • Necessary and sufficient conditions are presented for a polygon to be searchable by various searchers. • Studies the class of polygons for which the searcher with two flashlights is as capable as the searcher with a point light source • A necessary and sufficient condition is given for such polygons to be searchable by the searcher with two flashlights. • The complexity of generating a search schedule under some of these conditions is also discussed. • This paper cites Parsons, Megiddo and Lapaugh.
Visibility-based PE (S.M. Lavalle and coworkers) • S. M. LaValle, D. Lin, L. J. Guibas, J.-C. Latombe, and R. Motwani. “Finding an unpredictable target in a workspace with obstacles”. ICRA 1997, pp. 737--742, 1997. • L. J. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, and R. Motwani. “Visibility-based pursuit-evasion in a polygonal environment”. LNCS vol. 1272, pp.17--30, 1997. • L. J. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, and R. Motwani. , “Visibility-based pursuit-evasion in a polygonal environment”. International Journal of Computational Geometry and Applications, vol. 9, pp. 471--494, 1999. • S. M. LaValle and J. Hinrichsen. “Visibility-based pursuit-evasion: An extension to curved environments”. IEEE Trans. On Robotics and Automation, vol. 17, pp.196--202, 2002. • And many more …(http://msl.cs.uiuc.edu/~lavalle/vispe.html) 20
Visibility-based PE (S.M. Lavalle and coworkers) • These papers not only cite but actually discuss GS ideas • Search Number • Monotonicity • Etc. • This work has inspired many other robotics researchers • Many papers have been written on visibility-based PE • This research line continues vigorously to the present. 21
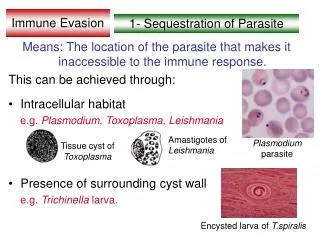
Assumptions • Region is simply connected polygon (no holes) • The pursuer has a map • There is one pursuer, with 360 vision • The evader is captured as soon as seen by the pursuer • The evader is arbitrarily fast • The evader always knows the pursuer’s position 23
Key Concepts • The polygonal region is denoted by F. • For every point x in F, the visibility polygon is and the invisibility set F–V(x) is the union of several disjoint simple connected polygons. • Some of these polygons are clean and some are dirty The boundary of V(x) consists of edges; • some of these are edges of the original F; • the remaining are gap edges (facing “free space”) 24
Invisibility set Visibility polygon Gap edges (black is clean, Red is dirty) 25
A point x has a V(x), with n associated gaps (n 0) each of which can be clean or dirty (i.e. the invisible component behind that gap will be clean or dirty). This information can be encoded in an n-long string (say of 0’s and 1’s) which we denote by B(x). Note: B(x) can also be the empty string. 26
Note: when we know x, we also know V(x) and so F–V(x), i.e. the invisible components. And S F–V(x). So we don’t really need to put S in the state, B(x) suffices (and it is discrete). Also: we can discretize F (break it into cells) provided we do not lose any critical information. Critical information is how gaps change. We need a discretization that preserves this information. 27
Critical Gap Events • A gap disappears • A gap appears (it gets a 0 label) • A gap splits into two gaps (they inherit the parents label) • Two gaps merge into a new one (it gets a 1 label if any of the original gaps had a 1) • Gaps can also change in noncritical ways (continuous transformation) • Assumption: we never have events which involve three gaps simultaneously 28
A gap disappears / appears A gap splits into two / two gaps merge. 29
Conservative Discretization • Form a discretization D={D1,…, DN} by: • extending all edges of F (inside F), • extending outward segments from all pairs of vertices (inside F) • Take all resulting sub-polygons as cells Di of the discretization. • This is a conservative discretization, i.e. no critical gap events occur while the pursuer moves inside one of the cells. 30
The rules: Example: 31
Along with the state space, we have a state transition graph. • We actually have two graphs: • Gc is the connectivity graph; it has N nodes (one per cell) and its edges follow the connectivity of the cells; it is an undirected graph. • GI is the information graph (the state transition graph) • nodes: for the i-th cell Di it has 2ninodes, where ni is the number of gaps associated with any x in Di • edges: they respect critical gap events and information changes. • Note: GI is a directed graph. 32
Example 1: Undirected adjacency graph Discretized polygon Example clearing sequence: 1-2 1/1 -> 2 Directed information graph 33
Undirected adjacency graph Example 2: Discretized polygon • Example clearing sequences: • 5-4-3-2 • 5/1 -> 4/1 -> 3/10 -> 2/0 • 3-4-3-2 • 3/11 -> 4/1 -> 3/10 -> 2/0 34 Directed information graph
Lavalle cites some of the classic graph search papers (Parsons, Megiddo etc.) • but he does not perform GS in the classical sense • instead he performs a shortest path computation in the information graph. • He develops an algorithm to determine if a polygon is 1-searchable • He also performs a theoretical analysis • (In what follows H(F) is the search number of polygon F.) 35
37 (By Chung, Hollinger, and Isler )
Some characteristics of the approach • Recontamination does help • The algorithm is computationally viable essentially only for 1- searchable polygons • (this is not the same as 1-searchable graphs) • The key concept in Lavalle’s formulation is visibility. • Lavalle’s work has been very influential, his papers are cited by many other works on robotic PE. • Most of these works keep the idea of visibility and visibility partition and try to find ways to make it computationally viable. 39
Hespanha • Hespanha, J.P. and Kim, H.J. and Sastry, S., “Multiple-agent probabilistic pursuit-evasion games”, 38th Decision and Control Conference, vol.3, pp. 2432--2437,1999. • Hespanha, J.P. and Prandini, M. and Sastry, S., “Probabilistic pursuit-evasion games: A one-step Nash approach”, 39th Decision and Control Conference, vol.3, pp.2272-2277, 2000. He cites both Lavalle and the classic GS papers but his approach is quite different. • unknown maps • probabilistic formulation • game theoretic point of view His approach works on any discrete environment; his examples deal with grids. 40
Isler • V. Isler, S. Kannan, and S. Khanna. “Randomized Pursuit-Evasion with Limited Visibility”. In ACM-SIAM Symposium on Discrete Algorithms, 2004. • V. Isler, S. Kannan, and S. Khanna. “Randomized Pursuit-Evasion in a Polygonal Environment”. IEEE Trans. on Robotics and Automation, 5(21):864--875, 2005. • V. Isler, S. Kannan, and S. Khanna. “Randomized Pursuit-Evasion with Local Visibility”. SIAM Journal on Discrete Mathematics, 1(20):26--41, 2006 41
Isler • Probabilistic search • Algorithms and theorems about capture with high probability • Search on graphs: • evader has local visibility • evader and pursuer move simultaneously • Search on polygons • The lion-and-man game (geometric version of the cops-and-robbers game) 42
PE in polygonal regions • Two lions can capture the man in any simply-connected polygon (Isler). • A single lion can capture the man in any simply-connected polygon in finite time (Isler). • In polygons with obstacles, multiple pursuers are necessary. • (Recently, Bhadauria et al. (2010) showed that three lions can capture the man in any polygon) • polygonal environments may require recontamination to clear with the minimal number of searchers. 43
44 (By Chung, Hollinger, and Isler )
Related Work on Probabilistic Graph Search • Adler, M. and Racke, H. and Sivadasan, N. and Sohler, C. and Vocking, B., Randomized pursuit-evasion in graphs, Combinatorics, Probability and Computing, vol. 12, pp.225--244, 2003. • Alpern, S. and Gal, S., The theory of search games and rendezvous, 2003. 46
Gerkey, Thrun and Gordon • Brian P. Gerkey, Sebastian Thrun, and Geoff Gordon. "Visibility-based pursuit-evasion with limited field of view". Intl. Journal of Robotics Research, vol.25, pp.299-316, 2006. • Brian P. Gerkey, Sebastian Thrun, and Geoff Gordon. "Parallel stochastic hill-climbing with small teams". In Multi-Robot Systems: From Swarms to Intelligent Automata, Vol. 3, pp. 65-77, Springer, 2005. 47
Gerkey, Thrun and Gordon PE in polygonal environments, visibility-based discretizations In the first paper: • Visibility-based PE is extended to a limited field of view • New φ –searcher (instead of the k-searcher) • Finding the minimal number of φ-searchers is NP-complete • Complete algorithm for a single φ-searcher. In the second paper: • Market-based algorithms, heuristics and stochastic action selection • They address difficult multi-robot problems • The PARISH algorithm • Benchmark: visibility-based PE 48
Hollinger and Kehagias • Guaranteed Search (Also Efficient Search) • G. Hollinger, S. Singh, J. Djugash, and A. Kehagias, "Efficient multi-robot search for a moving target," International Journal of Robotics Research, vol. 28, pp. 201-219, 2009. • A. Kehagias, G. Hollinger, and S. Singh, "A graph search algorithm for indoor pursuit/evasion," Mathematical and Computer Modeling, vol. 50, pp. 1305-1317, 2009. • A. Kehagias, G. Hollinger, and A. Gelastopoulos, "Searching the nodes of a graph: Theory and algorithms," ArXiv Repository, Tech. Rep. 0905.3359 • G. Hollinger, A. Kehagias, and S. Singh, "GSST: Anytime guaranteed search," Autonomous Robots, vol. 29, pp. 99-118, 2010. • G. Hollinger, A. Kehagias, and S. Singh, "Improving the efficiency of clearing with multi-agent teams," International Journal of Robotics Research, vol. 29, no. 8, pp. 1088-1105, 2010. • G. Hollinger, "Search in the physical world," Ph.D. dissertation, Robotics Institute, Carnegie Mellon University. 49
Characteristics of our approach • Mainly indoor environments (can also handle outdoor). • Simple visibility model, simple discretization of environment. • Cells nodes, evader lives in the nodes (node search). • Evader is invisible, arbitrarily fast, omniscient. • Goal: minimal clearing search • Search must be “rooted” and “internal” • Search should be monotone and connected (but we also study nonmonotone and disconnected) • Our algorithms use tree search and Barriere’s algorithm • GSST (Guaranteed Search by Spanning Trees) • G-GSST (Guardless GSST) • Our algorithms use tree search and Barriere’s algorithm 50