Download
1 / 10
100 likes | 223 Vues
Explore the impact of wrist flexibility on joint force solutions compared to traditional assumptions. Consider moment arms and muscle actions to derive accurate stabilization forces. Calculate FM for deltoid muscle with multiple unknowns.

E N D
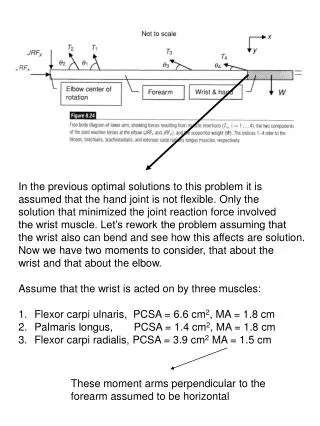
In the previous optimal solutions to this problem it is • assumed that the hand joint is not flexible. Only the • solution that minimized the joint reaction force involved • the wrist muscle. Let’s rework the problem assuming that • the wrist also can bend and see how this affects are solution. • Now we have two moments to consider, that about the • wrist and that about the elbow. • Assume that the wrist is acted on by three muscles: • Flexor carpi ulnaris, PCSA = 6.6 cm2, MA = 1.8 cm • Palmaris longus, PCSA = 1.4 cm2, MA = 1.8 cm • Flexor carpi radialis, PCSA = 3.9 cm2 MA = 1.5 cm These moment arms perpendicular to the forearm assumed to be horizontal
Flexor carpi radialis Palmaris longus Flexor carpi ulnaris
= 8.79 N = 246 N = 58 N = 236.7 N JRF = 403 N Note that by including the wrist muscle stabilzation forces that the T4 force is increased by nearly 10x’s
Scapula The shoulder joint also called the glenohumeral articulation is a ball and socket type of joint.
With respect to the movement of the humorous: Flexion – a forward upward movement Extension – return from flexion Abduction – movement to the side Adduction – return from abduction Medial rotation – inward rotation Lateral rotation – outward rotation
Find the value of the FM for the deltoid muscle to hold the arm in the position shown. We have 3 unknowns being FM, FJx, FJy • a = 15 cm, b = 30 cm, c = 60 cm • = 15 degrees, W = 40 N, W0 = 60 degrees