Educational Robotics
Educational Robotics. A Glimpse on Robotics Tutorial Material. Overview. What is a robot? Characterization Examples Anatomy Why do computer scientists care about robots? Survey of Educational Robotics Technology Lego Mindstorms Boards for Use with Lego Technics Tetrixx.

Educational Robotics
E N D
Presentation Transcript
Educational Robotics A Glimpse on Robotics Tutorial Material
Overview • What is a robot? • Characterization • Examples • Anatomy • Why do computer scientists care about robots? • Survey of Educational Robotics Technology • Lego Mindstorms • Boards for Use with Lego Technics • Tetrixx
Autonomous Mobile Robots • Machines capable of moving about their environment and demonstrating some kind of intelligent behavior • Permanent Perception-Cognition-Action cycle • Autonomy is the degree to which an agent's decisions are determined by its own observations and experience
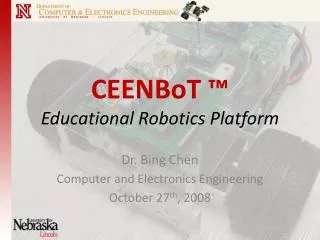
B21 from RWI 2 DoF omnidrive Pan-Tilt Unit 56 Bumper 48 IR Sensors 24 Sonars 1 Laser Scanner 2 Microphones 2 Cameras Stanislav
Robot Anatomy • Effectors • mobile bases • manipulators (arms, hands, grippers, kickers) • other • Sensors • Electronics • Software • operating systems • programming languages • programming environments • programming methodology • Robot control architectures
R-cam Show me room H20! stantalk stanright L-cam PTU laser GUI stanbook stanleft sonar base Robotics Software Technology • State-of-the-art mobile robots use networked hardware • Software is distributed across available hardware
Robotics is AI-complete • Complex autonomous mobile robots must • represent various kinds of knowledge • knowledge representation • spatiotemporal representations • make inferences from knowledge and plan their action • inference; deduction, abduction • planning and scheduling • perceive their environment • sensor interpretation and sensor fusion • pattern recognition, computer vision • interact with humans • speech, natural language processing • adapt to changing environments and tasks • machine learning • neural network learning, reinforcement learning • evolutionary learning
Role of Kinematics • kinematics and manueverability • kinematics and control
Robot Motion • Wheeled robots • Tracked robots • Legged robots • Humanoid robots • Exotic robots
Wheeled Robots • easy to build • easy to control • need flat terrain • cannot climb stairs
Tracked Robots • more difficult to build • easy to control • good on rough terrain • cannot climb stairs
Legged Robots • hard to build • hard to control • good on rough terrain • can climb stairs in principle
Exotic robots • hard to build • hard to control • stabilization is a major issue • solutions for virtually all environments