Download
1 / 1
20 likes | 233 Vues
Closed-loop Reservoir Management Using a Reduced-order Model-based Control & Uncertainty Propagation Framework Grant Title: Closed-loop Reservoir Management Using a Reduced-order Model-based Control & Uncertainty Propagation Framework

E N D
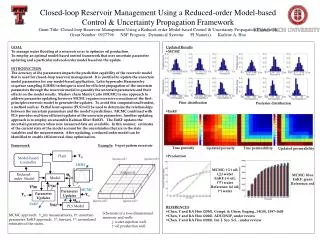
Closed-loop Reservoir Management Using a Reduced-order Model-based Control & Uncertainty Propagation Framework Grant Title: Closed-loop Reservoir Management Using a Reduced-order Model-based Control & Uncertainty Propagation Framework Grant Number: 0927796 NSF Program: Dynamical Systems PI Name(s): Karlene A. Hoo • GOAL • To manage water flooding of a reservoir so as to optimize oil production. • To employ an optimal model-based control framework that uses uncertain parameter updating and a particular reduced-order model based on the update. • INTRODUCTION • The accuracy of the parameters impacts the prediction capability of the reservoir model that is used for closed-loop reservoir management. It is justified to update the uncertain model parameters for any model-based application. Latin hypercube Hammersley sequence sampling (LHHS) technique is used for efficient propagation of the uncertain parameters through the reservoir model to quantify the uncertain parameters and their effects on the model results. Markov chain Monte Carlo (MCMC) is one approach to address parameter updating; however MCMC requires excessive executions of the first-principles reservoir model to generate the updates. To avoid this computational burden, a method such as Partial least squares (PLS) will be used to determine the relationships between the uncertain parameters and the model’s predictions. MCMC combined with PLS provides real-time efficient updates of the uncertain parameters. Another updating approach is to employ an ensemble Kalman filter (EnKF). The EnKF updates the uncertain parameters when new measured data are available. In this manner, estimates of the current state of the model account for the uncertainties that are in the state variables and the measurements. After updating, a reduced-order model can be identified to enable efficient real-time optimization. • FrameworkExample: 5-spot pattern reservoir • Updated Results • MCMC • EnKF • Production • REFERENCES • Chen, Y and KA Hoo (2010). Compt. & Chem. Enging., 34(10), 1597-1605 • Chen, Y and KA Hoo (2010). ADCONIP, under review • Chen, Y and KA Hoo (2010). Int. J. Sys. Sci. , under review Prior distribution Posterior distribution True porosity Updated porosity True permeability Updated permeability Plant Ym Model-based Controller LHHS MCMC: (◇) oil; (△) water EnKF: (+) oil; (▽) water Reference: (o) oil; (*) water Θk MCMC: blue EnKF: green Reference: red Reduced-order Model Model Ya(n) Yf(n) MCMC Parameter Updates Ym Ym Parameter Updates Θk+1 EnKF Y(n) PLS Model Schematic of a two-dimensional reservoir and wells ↓: water injection well ↑: oil production well MCMC approach: Ym(n): measurements, Θ: uncertain parameter. EnKF approach: Yf: forecast, Ya: assimilated estimates of the states.