Dynamic Bayesian Networks
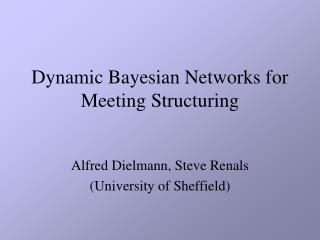
Representation. Probabilistic Graphical Models. Template Models. Dynamic Bayesian Networks. Template Transition Model. Weather. Weather’. Velocity. Velocity’. Location. Location’. Failure. Failure’. Obs’. Time slice t. Time slice t+1. Initial State Distribution. Weather 0.

Dynamic Bayesian Networks
E N D
Presentation Transcript
Representation Probabilistic Graphical Models Template Models DynamicBayesianNetworks
Template Transition Model Weather Weather’ Velocity Velocity’ Location Location’ Failure Failure’ Obs’ Time slice t Time slice t+1
Initial State Distribution Weather0 Velocity0 Location0 Failure0 Obs0 Time slice 0
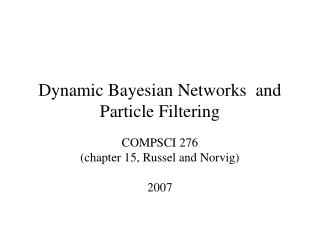
Ground Bayesian Network Weather0 Weather1 Weather2 Velocity0 Velocity1 Velocity2 Location0 Location1 Location2 Failure0 Failure1 Failure2 Obs0 Obs1 Obs2 Time slice 2 Time slice 0 Time slice 1
Tim Huang, Dieter Koller, JitendraMalik, Gary Ogasawara, Bobby Rao, Stuart Russell, J. Weber
Dynamic Bayesian Network • A transition model over X1,…,Xn is specified via • A dynamic Bayesian network is specified via
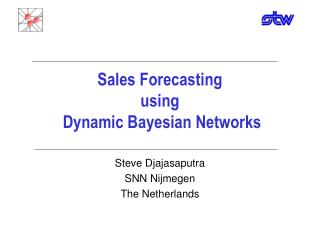
Hidden Markov Models S S’ S0 S1 S2 S3 O’ O1 O2 O3 0.3 0.1 0.5 0.7 0.4 0.5 s1 s2 s3 s4 0.6 0.9
Hidden Markov Models S S’ S0 S1 S2 S3 O’ O1 O2 O3 0.3 0.1 0.5 0.7 0.4 0.5 s1 s2 s3 s4 0.6 0.9
Consider a smoke detection tracking application, where we have 3 rooms connected in a row. Each room has a true smoke level (X) and a smoke level (Y) measured by a smoke detector situated in the middle of the room. Which of the following is the best DBN structure for this problem? X1 X1 X1 X1 X’1 X’1 X’1 X’1 Y’1 Y’1 Y’1 Y’1 X2 X2 X2 X2 X’2 X’2 X’2 X’2 Y’2 Y’2 Y’2 Y’2 X3 X3 X3 X3 X’3 X’3 X’3 X’3 Y’3 Y’3 Y’3 Y’3
Summary • DBNS are a compact representation for encoding structured distributions over arbitrarily long temporal trajectories • They make assumptions that may require appropriate model (re)design: • Markov assumption • Time invariance