Intelligent controller design based on gain and phase margin specifications
220 likes | 343 Vues
This study compares the performance of advanced control strategies, including PID, 2-DOF PID, and GPC, focusing on gain and phase margin specifications. Utilizing genetic algorithms, the research addresses the tuning of controllers for single-input, single-output (SISO) systems. The evaluation involves simulations across twelve models with varying stability characteristics. Results indicate that GPC consistently outperforms traditional PID implementations, highlighting the advantages of advanced control structures in handling complex systems. The study also discusses the challenges in tuning these controllers and their real-time application potential.

Intelligent controller design based on gain and phase margin specifications
E N D
Presentation Transcript
Intelligent controller design based on gain and phase margin specifications Daniel Czarkowski and Tom O’Mahony* Advanced Control Group, Department of Electronics Engineering, Cork Institute of Technology, e-mails: dczarkowski@cit.ie * tomahony@cit.ie
Overview • Do advanced control structures significantly outperform PID for SISO systems? • Compare • PID • 2-DOF PID • GPC ISSC 2004, Belfast
Contents List • Types of controllers • Tuning • Gain and phase margin criteria • Non convex problem to be solved • Genetic Algorithms • Models used in the evaluation • Results • Conclusions ISSC 2004, Belfast
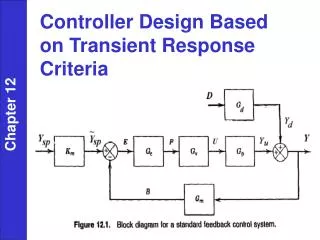
PID controller • Controller structure • Control law • 3 Variables to tune ISSC 2004, Belfast
2-DOF PID controller • Controller structure • Control law • 6 variables to tune ISSC 2004, Belfast
GPC controller • Introduced by Clarke et al., 1987 • Two degree of freedom structure • Digital controller was used • Unconstrained control algorithm • 7 tuning parameters ISSC 2004, Belfast
GPC properties • Advantages • Two degree of freedom • Optimal controller • Can handle more complex systems • More flexible structure • Disadvantages • No well developed tuning rules • More difficult to tune • Very few industrial implementations ISSC 2004, Belfast
Design strategy • Performance & robustness • Performance • IAE servo + regulator • Robustness • Gain and phase margin ISSC 2004, Belfast
Non-convex problem • Inverse unstable system Avoid local minima! ISSC 2004, Belfast
Genetic Algorithms • Stochatistic optimisation method • Gray Coding • Stochatistic Universal Sampling, SUS • Single point crossover • Maximum number of generations, 300 • Population size, 100 • Constraints on the controller parameters ISSC 2004, Belfast
Direct the GA • GA optimisation problem • Penality factors on gain and phase margins ISSC 2004, Belfast
Models • Benchmark test • Inverse unstable system • Integrating systems • Underdamped system • Conditionally stable system • 3 models with time delay • First order model • 12 models were evaluated (K. J. Åström 1998, 2000) ISSC 2004, Belfast
Results • Comparison of PID, 2-DOF PID and GPC GPC outperforms the other two counterparts ISSC 2004, Belfast
Results • Design based on minimum Am=6dB • GPC vs PID,average IAE decreased by 43% • GPC vs 2-DOF PID,average IAE decreasedby 25% • 2-DOF PID vs PID,average IAE decreased by 24% • Design based on minimum Am=14dB • GPC vs PID, average IAE decreased by 37% • GPC vs 2-DOF PID, average IAE decreasedby 22% • 2-DOF PID vs PID, average IAE decreasedby 15% ISSC 2004, Belfast
Set-point following • Model • Design • Results Better robustness achieved by PID controllers! ISSC 2004, Belfast
Set-point following • Model • Design • Results GPC performs 25% better than the PID controllers! ISSC 2004, Belfast
Set-point following • Model • Design • Results GPC does not perform better than the PID controllers! ISSC 2004, Belfast
Summary of work • A GA approach to tuning controllers based on gain and phase margin was applied • Novel optimisation function was proposed • Twelve models were tuned • Three controllers were evaluated • The controllers were subsequently employed on a real time system ISSC 2004, Belfast
Conclusions • GPC performance depends on the sampling period • Tuning strategy works well, but... • GPC performed better in simulation, but... • Do advanced control algorithms perform better? ISSC 2004, Belfast