Download
1 / 14
140 likes | 260 Vues
In this work, we explore techniques for extracting cosmological signals from datacubes, wherein the axes represent spatial coordinates and frequency. We examine three critical components: the cosmological signal, astrophysical foregrounds, and noise. Our approach utilizes skewness in the context of signal extraction, leveraging properties of foregrounds assumed to be smooth in frequency. We evaluate various fitting methods, analyze the implications of fitting errors, and test signal extraction algorithms through simulations. Our findings highlight the challenges of accurately subtracting foregrounds amidst structured noise.

E N D
EOR signal extraction using skewness (astro-ph: 0809.2428) Geraint Harker Kapteyn Astronomical Institute, Groningen Hamburg LOFAR Workshop
The problem • Extract a cosmological signal from a datacube, the three axes of which are x and y positions, and frequency. • Consider three components: • The cosmological signal itself; • Iliev et al. (2008) • Thomas et al. (2008) • Astrophysical foregrounds; • Jelić et al. (2008) • Noise. • The foregrounds are expected to be smooth in frequency, which allows them to be fitted out. • Does the signal also have any special properties which should enable us to tease it out? • Seek statistics which are robust with respect to making incorrect assumptions about the foregrounds and noise. Hamburg LOFAR Workshop
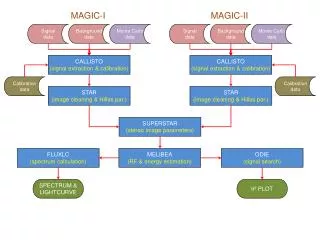
A pipeline for testing signal extraction algorithms Compare 100h-1Mpc Subtract foregrounds Signal Residuals Tile Instrumental response 5° Noise Foregrounds Dirty map Hamburg LOFAR Workshop
Fitting a line of sight • Foregrounds are assumed smooth as a function of frequency. • Fit with e.g. a polynomial, or use some sort of non-parametric fit. • If the fitting is biased, how does this relate to the statistics used for signal extraction? • Are fitting errors correlated in the same way as noise? • Better to fit uv points rather than image pixels? Hamburg LOFAR Workshop
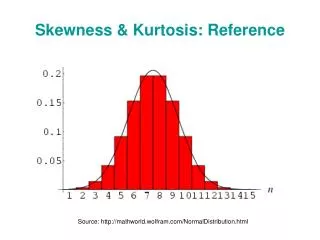
One-point distribution from simulations • δTb = (stuff)∙xHI ∙(1+δ)∙(1+z)1/2 • Skewness=μ3/σ3 • At early times, the brightness temperature follows the cosmological density field which is positively skewed. • Reionization generates ionized bubbles (‘Swiss cheese’), which show up as a peak at zero emission in the one-point distribution, reducing the skewness. • At the late stages of reionization, the few remaining areas with emission form a high-δTb tail. f250C simulation Hamburg LOFAR Workshop
Evolution of skewness in the cosmological signal Three simulations: f250C - Iliev et al. (2008) T-QSO Thomas et al. (2008) T-star Hamburg LOFAR Workshop
Skewness from dirty maps with no foregrounds • Convolve images of the cosmological signal with the instrumental response, and add realistic noise. • This is equivalent to achieving perfect foreground subtraction (and very similar to the case when fitting errors have exactly the same characteristics as the noise). • Look at the skewness of the one-point distribution in these residual images as a function of redshift. • Some features of the signal recovered, but at low redshift, where the signal is very small, the noise dominates. Hamburg LOFAR Workshop
Evolution of skewness in residual maps • Fit the foregrounds with a third-order polynomial in logν. • Skewness in the residual maps dominated by fitting errors and noise. • Can no longer recover the redshift evolution of skewness. • If the noise on each image pixel was independent, then smoothing the images would help (because of correlations in the signal). • The real noise is more structured, so we require something more sophisticated. Hamburg LOFAR Workshop
Deconvolved maps • For the residual map at each frequency, attempt to reconstruct the cosmological signal with a Wiener deconvolution. • Optimal in a least-squares sense, BUT... • Requires knowledge of the correlation properties of the signal and noise, though in fact we ignore the contribution from the fitting errors. • Recovers the main features of the evolution of the skewness in the cosmological signal simulations. • The dip followed by the rise may be hard for noise and bias to mimic. (Original simulations) Hamburg LOFAR Workshop
Some ongoing work… • Might the real foregrounds be more skewed and will this require a more sophisticated foreground subtraction algorithm? • Test the level of accuracy to which the correlation properties of the cosmological signal must be estimated to make the Wiener deconvolution feasible (relation here to power spectrum estimation). • Can the whole process be carried out in the uv-plane? • Generate larger simulations of the signal which don’t require tiling. • Effect of exotic reionization scenarios – does this wipe out the ‘generic’ features? • Other statistics. Hamburg LOFAR Workshop
Summary • We test the LOFAR EoR signal extraction algorithms using datacubes including the cosmological signal, foregrounds , noise and instrumental effects. • Subtracting foregrounds which are smooth in frequency leaves a cube with three components: cosmological signal, noise and fitting errors, which have different correlation properties. • We exploit these properties to differentiate the cosmological signal from the fitting errors and noise. • The skewness of residual maps ‘denoised’ in this way shows similar (generic) features as a function of redshift to the cosmological signal simulations. • The difficulty comes from a combination of having to accurately subtract foregrounds and deal with structured noise. Hamburg LOFAR Workshop
Scale-dependence of components of residual maps Hamburg LOFAR Workshop
Skewness of smoothed maps for the uncorrelated noise case (‘original maps’) Hamburg LOFAR Workshop
Definitions Differential brightness temperature Density field Neutral fraction Third moment Skewness (Variance)3/2 Hamburg LOFAR Workshop