Particle Filter for Robot Localization
This work presents a particle filter algorithm designed for robot localization within a given bitmap map. The robot utilizes noisy odometry and range-finding data to determine its position by measuring distances to walls from various angles. By assuming a gyroscope provides consistent angle measurements, the robot continually compares its measurements against potential map locations to find the most likely position. The algorithm incorporates the importance of sequence tracking and unique features in ensuring accurate localization, especially when faced with complex and ambiguous environments.


Particle Filter for Robot Localization
E N D
Presentation Transcript
Particle Filter for Robot Localization Vuk Malbasa
Problem • Map is given as bitmap • It is possible to measure distance to dark like from any position • Robot needs to find out where on the map it is located • Only available data is: • Odometry (noisy) • Range finding (noisy) • Robot is programmed to follow a particular route around the map and is allowed to measure at each time step
Robot sensors • The robot measures distance to wall from several directions • I assumed that a gyroscope would always let the robot take measurements from the same angle • Additive noise is simulated in the measurements as ε ~ N(0,1) • The robot sees a vector of distances • To localize the robot needs to find a spot on the map which has similar distances to what it sees • The measure of similarity • Given the current robot measurements as the mean of a normal distribution with a large standard deviation how likely are the measurements taken from different locations across the map? R
Measurements • Sometimes the measurements can be ambiguous • When there the robot is in a repetitive position on the map the distance function can be deceiving • This is where odometry helps • When in the features that the robot sees are unique to that position on the map then the distance function has one optimum
Measurements • When the map is complex and the measurements are noisy then the distance function shows multiple optima • This leads to the importance of keeping track of previous positions of particles • While a positions measurements may not be unique to a particular place on the map, the sequence of measurements is unique
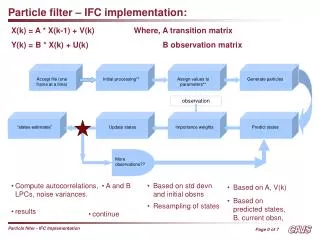
Algorithm initialize particles for i = 1:length(movement) take measurements from current position simulate measurements for particles calculate distance function assign weights resample move robot move particles end
Practice At the beginning of the movement there are many possible positions because of noisy measurements and the wide Gaussian distance function After a few iterations there are only two major positions left and the biggest one is wrong However once the robot moves into a place on the map with unique measurements there is only one position
Parallel to evolutionary computation loop predict evaluate resample end Particle filters Evolutionary Computation loop simulate evaluate reproduce end Uncanny similarity