Integrating Motion Equations and Enhanced Sensors for Precision Measurement Systems
This document outlines the equations of motion and details the integration of various sensors, including the ADXL105EM-3 accelerometer and the Microgyro 100 gyroscope. It discusses acceleration and rate measurement with defined sensitivity and operational parameters. Additionally, it introduces the TFX-11 data logger and ADC, elaborating on its capabilities, operation voltage, and data handling. Potential enhancements such as signal amplification and increases in ADC resolution are proposed, alongside considerations for noise, calibration, and trajectory simulations for improved accuracy.

Integrating Motion Equations and Enhanced Sensors for Precision Measurement Systems
E N D
Presentation Transcript
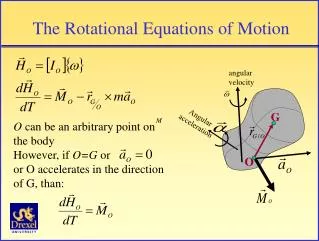
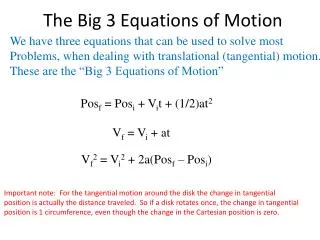
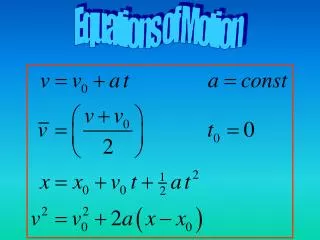
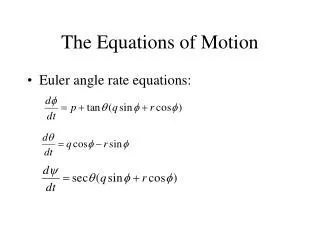
The Equations of Motion • Euler angle rate equations:
Sensors • Acceleration Measurement • ADXL105EM-3 (Triple axis accelerometer) • Range = ± 4g • Sensitivity ~ 500mv/g • Operating Voltage = 5 V DC • Rate Measurement • Microgyro 100 (Dual axis rate gyroscope) • Range = ± 100°/sec • Sensitivity = 1.1 x 10-3 mV/ degree / sec • Operating Voltage = 5 V DC
Electronics • TFX -11 (DATA LOGGER AND ADC) • 12 bit ADC • Non-Hold and Sample type • 11 12-bit channels and 8 8-bit channels • Operation Voltage = 0~5 V • 24 Digital I/O ports • 512 K Data storage memory (SFLASH) • Other Electronics Used • Salen-Key Filter (Low Pass) - 5 Hz • Non-Inverting Amplifier to increase sensitivity of rate gyros
Accelerometer Salen-Key filter 12 bit ADC Data logger ( TFX-11) Integration Routines Gyroscope Amplifier Trajectory INS System Description
Sensitivities, Ranges and Calibrations • Acceleration Measurement • Sensitivity : - 1 g corresponds to around 500 mV • ± 4g is mapped 0.5 ~ 4.5 V (for mean = 2.5 V) • Rate Measurement • Sensitivity : - 1 degree/sec corresponds to 1.1 mV • ± 100°/sec is mapped to a band of 220 mV about mean Operable region by data logger constraint = 0 ~ +5 V
Quantization and resolution error simulation. Sensor Model Noise Model Calibration Integration Routines Mean by Averaging Stationary data Trajectory Simulation Structure INPUTS ax , ay , az p , q , r
Effect of Resolution Amplification of rates = 20 Amplification of accel. = 1 All the parameters set to 0
Proposed Changes • Amplification of rate sensor signals by around 20. • Amplification of accelerometer signal by around 2.5 • Increasing resolution of ADC from 12-bit to 16-bit
REALIZATION • Stepping down to zero. Can it be done accurately? • Amplification. Will it add noise? • Possibility of alteration of accelerometer range online. • Other problems or aspects.