Download
1 / 133
1.33k likes | 1.4k Vues
Amirkabir University of Technology Computer Engineering & Information Technology Department. Planning and Navigation. دکتر سعید شیری قیداری & فصل 6 کتاب. Cognition. Cognition عبارت است از تصمیم گیری هدف مندانه و اجرای آن توسط یک سیستم برای نیل به یک هدف سطح بالا .

E N D
Amirkabir University of TechnologyComputer Engineering & Information Technology Department Planning and Navigation دکتر سعید شیری قیداری & فصل 6 کتاب
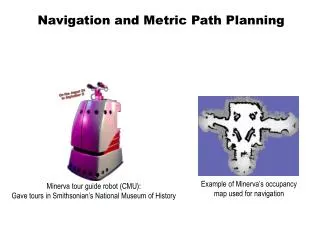
Cognition • Cognitionعبارتاستازتصمیمگیریهدف مندانهواجرایآنتوسطیکسیستمبراینیلبهیکهدفسطحبالا. • دریکروباتمتحرک اینامرمتوجهمسئله navigation استکهباعثمیشودتاروباتباداشتناطلاعاتجزئیازمحیطومقادیرسنسورهابتواندبهموقعیتهدفبرسد. • Navigation شاملاجراییکسریعملياتبرایرسیدنبههدفمیشود (planing) کهدرضمناجرایآنروباتبایدازبرخوردباموانعجلوگیرینماید. (reacting)
Path planning • مسئلهمسیریابیبرایروباتهایمتحرکیکامراساسیاستاماقبلازبرایرباتهایصنعتینیزمطرحبودهومطالعاتزیادیدراینزمینهشدهاست. • بعلتمحدودیتدرجاتآزادیروباتهایمتحرکاینمسئلهبرایآنهاسادهترازروباتهایصنعتیمیباشد. • درروباتهایصنعتیبعلتسرعتزیادعلاوهبرسینماتیکمسئلهدینامیکهممهماست.
Configuration Space • مسئلهمسیریابیبرایروباتهایصنعتیومتحرکدرفضائیبانام configuration space انجاممیشود. • برایروباتیبا k درجهآزادیهرترکیبموقعیتآنرامیتوانبا k مقدارحقیقی q1,…,q kنشانداد. کهاینمقادیرنقطهایمثل p رادرفضای kبعدینشانمیدهند.اینفضا configuration space نامیدهمیشود.
Free Space • اگرفضایحقیقی (work space ) دارایمانعباشد،عملمسیریابیبایدمسیریازنقطهاولیهبههدفپیدانمایدکهبدونمانعباشد.اینمسیرفضایآزادنامیدهمیشود: F=C-O فضایازاد فضایموقعیت فضایمانع
Configuration Space فضایموقعیتوفضایآزادومسیریکهبههدفمنجرمیشود یکروباتبادودرجهآزادیدرفضایحقیقی
configuration space of a mobile robot • براییکروباتمتحرکرسمبرایناستکهآنرابصورت holomonic فرضکنیم.دراینصورتروباترامیتوانبصورتیکنقطهدرنظرگرفت . • درنتیجهفضایموقعیترامیتوانبصورتدوبعدیبامحورهای x, y نشانداد. • دراینحالتاشیاموجوددرمحیطباندازهشعاعروباتبزرگمیشوندتافرضنقطهایبودنروباتدرستباشد.
Free Space Obstacles Robot x,y Example of a World (and Robot)
Free Space Obstacles Robot (treat as point object) x,y Configuration Space:Accommodate Robot Size
Path Planing • فرضمیشودکهیکنقشهمناسبازمحیطوجودداشتهباشد: • توپولوژیک • متریک • یاترکیبیازاین دو • اولینمرحلهازمسیریابیتبدیلنقشهبهیکنقشهگسستهاست. اینکاربهچندطریقممکناستانجامشود: • Visibility Graph • Voronoi Diagram • Cell Decomposition Connectivity Graph • Potential Field
Road-Map Path Planning: • دراینروشفضایآزادبصورتشبکهایازمنحنیهاویاخطوطکهنقشهراهنامیدهمیشوندنشاندادهمیشود. • مسیریابیدراینحالتعبارتاستازاتصالمبداومقصدروباتبهنقشهراهوبدنبالآنجستجویراههائیکهایندورابههممتصلمیکنند. • دراینروشفضایحالتروباتبااستفادهازهندسهموانعتجزیهمیشود. • دوروشمختلفبرایاینکار: • Visibility Graph • Voronoi Diagram
Visibility Graph • Visibility Graph (گراف پدیداری)براییکفضایموقعیتمرکبازچندضلعیهاازلبههائیتشکیلمیشودکهرئوسچندضلعیهارادوبدوبههممتصلمیکنند. • وظیفهمسیریابپیداکردنکوتاهترینمسیرازمبدابهمقصداست. • پیادهسازیاینروشسادهبوده ومسیرپیداشدهتوسطآنبهینهاست. • اگرتعداداشیامحیطزیادشودتعداد لبههاوگرههازیادشدهوسرعتالگوریتمکاهشمییابد. • مشکلجدیاینروشایناستکهمسیرپیداشدهتوسطآنروباتراتاحدممکنبهاشیانزدیکمیکند.
Visibility Graph • G: non-directed graph • گره ها عبارتند از نقطه شروع و هدف و رئوس چند ضلعی ها • یال ها عبارتند از خطوط مستقیمی که از اتصال دو نقطه بدست می آیند و هیچ مانعی را قطع نمیکنند. qGoal qinit
الگوریتم • Construct a visibility graph G • Search G for a path from qinit to qgoal • If a path is found, return it; otherwise, indicate failure • Construction most expensive: - naively O(n3) - sweep-line algorithm renders it O(n2 log n) - O(n2) proposed.
Reduced Visibility Graphs • میتوان با کاهش تعداد یالها مرتبه اجرای الگوریتم را کاهش داد. • از G رئوس مقعر و یالهای non-tangentحذف میشوند. یال tangent یالی است که از هر دو گره برموانع مماس باشد. qgoal Algorithm: O(… + n log n) possible. qinit Qgoal qinit
Voronoi Diagram • برخلاف روش visibility graph این روش سعی دارد تا فاصله روبات تا اشیا را حداکثر نماید. • برای ساختن Veronoi graphنقاطی از صفحه که فاصله شان ازدو و یا چند شیئ یکسان است پیدا شده و به هم متصل میشوند. این نمودار شامل خطوط صاف و منحنی خواهد بود. • مسیر یافته شده توسط این روش با مسیر بهینه فاصله دارد. • اجرای این الگوریتم بر روی روبات ساده است: روبات با استفاده از سنسور های فاصله سعی درحداکثر کردن فاصله اش از اشیا اطراف خواهد نمود تا همیشه در مسیر این نمودار قراربگیرد. • این خطر وجود دارد که روبات بعلت محدودیت سنسورهایش قادر به اندازه گیری فاصله تا اشیا دور نباشد.
Voronoi diagram • Voronoi diagram of floor map
Naive Method of Constructing Voronoi Diagrams • compute all arcs (for each vertex-vertex, edge-edge, and vertex-edge pair) • compute all intersection points (dividing arcs into segments) • keep segments which are closest only to the vertices/edges that defined them
Cell Decomposition • در این روش محل های مربوط به فضای آزاد و اشیاء از هم جدا میشوند. برای اینکار: • فضا را به نواحی ساده و به هم متصلی به نام سلول تقسیم کنید. • سلولهای آزادی که مجاورهم هستند را مشخص نموده ویک گراف اتصال تشکیل دهید. • سلولهائی که حاوی نقطه مبدا و مقصدهستند را پیدا کنید. • مسیری در گراف اتصال پیدا کنید که این سلولها رابه هم وصل کند. • در این سلولها مسیری را پیدا کنید که از آن سلول عبور کند. مثلا مسیری که نقطه وسط سلول را به مرزهایش وصل نماید.
Cell DecompositionTrapezoidal Decomposition • بازایهریکازرئوسموانعخطعمودیدرفضایآزادرسممیشودکهیابهمانعدیگریبرسدویابهمرزبرخوردکند
Cell DecompositionTrapezoidal Decomposition • باتقلیلمحیطبهسلولهامیتوانگرافمتناظریراساخت start goal
Cell DecompositionTrapezoidal Decomposition • بااستفادهازیکگرافمجاورتمیتوانمسیریراازمبدابهمقصدبدستاورد. start goal
Approximate Cell Decomposition • یکی از روشهای متداول در مسیریابی روباتهای متحرک است که بخصوص برای مواردی که محیط بصورت grid based استفاده میشود. • فضا به سلولهائی با اندازه ثابت( یا متغیر) تقسیم بندی میشود. • در حالت استفاده از سلول با اندازه ثابت ممکن است برخی مسیرها از دست بروند.
Adaptive Cell Decomposition Uniform Quadtree
مسائل • پیوستگی مسیر تابعی از رزولوشن انتخاب شده است. • با افزایش رزلوشن پیچیدگی محاسباتی افزایش می یابد. • مواردی وجود دارند که دقت از بین میرود. برای مثال در شکل زیر تشخیص مانع از فضای آزاد مشکل خواهد بود
Path / Graph Search Strategies برای جستجو از تکنیک NF1 و یا grassfire استفاده میشود که در آن به هر سلول فاصله آن تا نقطه هدف نسبت داده میشود. سایرروشها: Breadth-First Search Depth-First Search Greedy search and A *
The Wavefront planner • ازاینالگوریتممیتوانبرایتعیینکوتاهترینفاصلهبیندونقطهاستفادهنمود. • درحقیقتیکجستجوی breadth first انجاممیدهد. • مقداردهیاولیه: • فضایآزادبا 0 علامتگذاریمیشود • موانعبا 1 علامتگذاریمیشوند. • مقصدبا 2 علامتگذاریمیشود.
The Wavefront planner • ازنقطههدفشروعکردهوسلولهایمجاورآنرایکواحدافزایشمیدهیم.
The Wavefront planner • بههمینترتیببرایسلولهایمجاورعملمیکنیم. • الگوریتمآنقدرادامهپیدامیکندتاهیچسلولیکههمسایهبرزگتراز 2 داشتهبرابرصفرنباشد. مگرسلولیهائیکهقابلدسترسنباشند.
The Wavefront planner • برایپیداکردنکوتاهترینمسیرباشروعازمبدادرجهتیحرکتمیکنیمکهمقدارعددیسلولهاکمترشود.
Potential Field Path Planning • با توجه به مشکلاتی که برای نمایش فضای موقعیت وجود دارد روشهای دیگری توسعه یافته اند که از طریق جستجو در محیط فضای آزاد را شناسائی میکنند. یکی از این روشها روش میدان پتانسیل است. • اینروشیکمیدانویاگرادیانیدرنقشهروباتایجادمیکندکهمیتواندروباتراازموقعیتفعلیبهسمتهدفهدایتنماید. • روباتبصورتیکنقطهفرضمیشودکهتحتتاثیریکمیدانپتانسیل U(q) قراردارد. میدان بصورت یک تابع مشتق پذیر تعریف میشود. روباتهمانندتوپیکهدرسرازیریقرارداردمسیرمیدانرادنبالمیکند. • نقطههدفبصورتیکنیرویجاذبوموانعبصورتنیروهایدافععملمیکنند. برایندنیروهایدوگانهبهروباتاعمالخواهدشد.بدینترتیبروباتهمزمانباحرکتبسویهدفازموانعنیزدورخواهدشد. • اگراشیاجدیددرمسیرروباتقراردادهشوندمیدانطوریتغییردادهمیشودتاتاثیرآنهارادربرداشتهباشد.
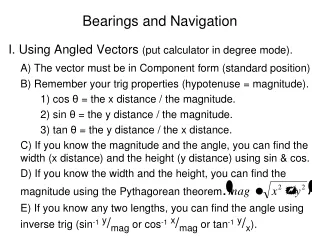
Potential Field Generation • اگرروباتبصورتیکنقطهفرضشودمیتوانازqصرفنظرنمودهومیدانپتانسیلU(q)رابصورتدوبعدیدرنظرگرفت. دراینصورتنیروئیکهدرنقطهq=(x,y) برروباتاثرمیکندعبارتاستاز: • سرعتروبات (vx, vy)متناسببانیرویF(q)درنظرگرفتهمیشود.
Attractive Potential Field • پتانسیلجذبیرامیتوانبصورتیکتابعسهمیگوندرنظرگرفت. • دراینرابطه Kattضریبمقیاسوrgoal(q) فاصلهاقلیدسی || q-qgoal ||تاهدفرامشخصمیکند. بامشتقگیریازاینرابطهمقدارنیرویجاذببدستخواهدآمد. وقتیکهروباتبههدفمیرسدمقدارایننیروصفرخواهدشد.
Repulsing Potential Field • نیرویدافعهبایدروباتراازموانعمعلومدورسازد. ازاینرومقدارآنوقتیکهروباتبهموانعنزدیکمیشودبایدزیادبودهووقتیکهروباتبقدرکافیازموانعدوراستتاثیرچندانینداشتهباشد. • دراینرابطه Krepضریبمقیاسوr(q) حداقلفاصلهاز q بهشیئوr0فاصلهتاثیرشیئاست .مقدارمیداندافعهمثبتویاصفربودهوبانزدیکشدنبهشیئمقدارآنبینهایتمیشود. اگرمرزشیئمحدببوده وبصورتتکهتکهمشتقپذیرباشدمیتوانازr(q) مشتقگرفت.دراینصورت:
Generating the Potential FieldA Parabolic Well for Attracting to Goal
Potential Field Path Planning: • محدودیتهایاینروش: • احتمالقرارگرفتندرمینیمممحلیوجوددارد. • دراشیامقعرممکناستچندینفاصلهحداقلr(q)وجودداشتهباشد. اینامرممکناستبهنوسانبیندونقطهنزدیکبهشیئمنجرگردد. • اگرنتوانروباترابصورتنقطهایفرضکردمسئلهبعرنجخواهدشد.
Extended Potential Field Method • دراینروشدومیدانبهصورتزیرتعریفمیشود: • Rotation Potential Field اینمیداننیرویدافعهراتابعیازفاصلهتامانعوجهتروباتفرضمیکند. طوریکهاگرروباتموازیمانعبودنیرویدافعهمانعکمتراثرنماید. بدینترتیبعمل wall following راحتترانجاممیشود. • Task potential fieldبااستفادهازسرعتروباتاشیائیکهنبایدتاثیریبرمیدانپتانسیلداشتهباشندرامشخصمینماید.اینکارمسیرهموارتریراایجادمینماید.
Extended Potential Field Method مقایسهبیندوروش