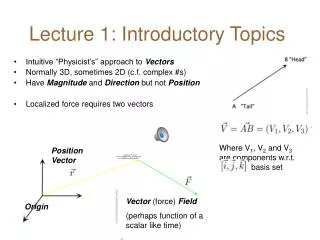

Introductory Lecture
E N D
Presentation Transcript
Introductory Lecture About class Grading Types of projects for this class General Information
This material is easy and part of it you can read by yourself. • When you read it, please think how you can apply these ideas in practical robots. • Look also to internet to find who sells these and similar items that can be used in your robot
General Information • Find my webpage • Find class webpage • Read it regularly • There will be always new materials posted. • We will have additional meetings with me related to class material and projects • There is laboratory for this class, which is graded. Melih will talk about it.
Class Grading • Class attendance (10%) • Homework 1 (10%) (can be part of final project) • Homework 2 (10%) (can be part of final project) • Total of unexpected quizzes (10%) • Formal Presentation of student’s work presented to the class (10%) • Lab attendance, work, and partial project reports returned to Melih (30%) • Final Project Report delivered to Perkowski (20%)
Levels of robot creation Robot System Integration Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • A class as a whole covers all of the above • Your project(s) should cover few of these
Conclusion on projects • Mechanical design is an important component of this class • This class is not only programming, you have to pay more attention to mechanical and interfacing aspects of robot design. • Robot programming is different from standard programming, it is a real time application programming.
Hardware Projects for Fall 478 (some software needed to demonstrate the functionality • Design an arm for a large humanoid robot using aluminum bars and brackets, not 3D printed. • Arm 3D printed for a robot • Design a head of a large humanoid robot that will replace InMoov’s head. Not 3D printed. Concentrate on sensors and motion. • Design a leg for a large humanoid robot. Not for walking for all kinds of gymnastic exercises.
Software Projects (no new hardware design) • Jimmy robot theatre using Bhutada’s language and system • Jimmy robot theatre using Tony Muilenburg’s language and system • Jimmy robot theatre using Mathias Sunardi’s language and system (Mathias helps) • Robot for the Dean – MCESBOT or Mr. Jeeves
Levels of robot creation: MCECSBOT = the guide robot for the dean Robot System Integration (navigation) Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Second hand should be added, head and neck should be added • Navigation, Localization, obstacle avoidance must be improved • A robot language can be developed or adapted in place of current improvisation • Robot safety, reliability and self-test • Needs internet link and external tele-control
Levels of robot creation: Albert Einstein Robot System Integration (Kinect control of gestures) Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Hands should be added • Head animation should be restored • Navigation, Localization, obstacle avoidance must be integrated again • A robot language can be developed or adapted in place of current improvisation • Needs internet link and external tele-control • Needs to integrate KINECT from outside the window
Levels of robot creation: 478 Countess Quanta LOKI = GUIDEBOT = PEOPLEBOT Robot System Integration (playing music with gestures) Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Second hand should also play an instrument • Navigation, Localization, obstacle avoidance must be integrated again • A robot language can be developed or adapted in place of current improvisation • Needs internet link and external tele-control • Needs to add KINECT and other sensors
Levels of robot creation: Marie Curie Robot System Integration (playing music with gestures) Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Curie waits for legs and lower torso • A robot language can be developed or adapted in place of current improvisation • Needs internet link and external tele-control • Needs to add KINECT and other sensors
Levels of robot creation: Frankenstein’s Monster Robot System Integration Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Hands must be animated • It should play an instrument • Legs and lower body should be added and animated • A robot language can be developed or adapted in place of current improvisation • Needs internet link and external tele-control • Needs to add KINECT and other sensors
Levels of robot creation: Sir Isaac Newton Robot System Integration (dances with sword) Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Second hand must be added • Mobile base can be added • It should play an instrument • A robot language can be developed or adapted • Needs internet link and external tele-control • Needs to add KINECT and other sensors
Levels of robot creation: Rhino =A chemist robot Robot System Integration (control by hand gestures) Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • Head must be added • It should perform chemical experiments • A robot language can be developed or adapted • Needs internet link and external tele-control • Needs to add KINECT and other sensors
Conclusion on projects • Mechanical design is an important component of this class • This class is not only programming, you have to pay more attention to mechanical and interfacing aspects of robot design. • Robot programming is different from standard programming, it is a real time application programming.
Class information • Get key for the lab from departmental secretary • Find or create a project group. Talk to other members, give me information on Thursday. • Find page Perkowski Page on Google • Find class 479 below the Embedded Robotics 478 class. • User id = logic, password = synthesis.