Advanced Techniques in Geometric Transformations and RANSAC for Robust Estimation
This document explores geometric transformations including translation, rotation, scaling, and rigid flow, alongside the RANSAC algorithm for robust estimation in data fitting. It highlights the impact of outliers on least squares fit and describes methods for classifying data points and improving model accuracy using inliers only. Detailed examples from Hartley & Zisserman showcase practical applications in stereo vision, optical flow, and panoramic image reconstruction, showcasing effective parameter estimation techniques and the correlation approach for depth estimation.

Advanced Techniques in Geometric Transformations and RANSAC for Robust Estimation
E N D
Presentation Transcript
EE 7700 Geometric Transformations
Geometric Transformation translation Rotation matrix scale Scale matrix rotation & scale Rigid flow
EE 7730 RANSAC: RANdom SAmple Consensus
Outliers • Consider the least squares fit for optical flow: If some of the values are wrong, it will degrade the estimation.
Outliers • It is best not to include outliers in the estimation. Line Fitting Problem: Given (x1,y1), …, (xN,yN); find the line y=ax+b Outliers Best fit is degraded due to the outliers
Robust Estimation • Two step process: • Classify data points as outliers or inliers • Use inliers only to fit a model
RANSAC • Repeat for k times: • Randomly choose n points (the smallest number of points required) from the data. • Estimate the parameters using these points. • For each data point other than these n points: • Check if the data point is within a threshold, t, distance of current model; if it is, the data point is consistent with current model. • The total number of data points that are consistent is model’s support. • If the support is larger than a predetermined number, d, then there is a good fit. Re-estimate the parameters using these inliers. • Choose the best fit with the smallest fitting error.
RANSAC Two samples and their supports for line-fitting
Example • Find the perspective parameters from Hartley & Zisserman
Example • Apply corner detectors to both images from Hartley & Zisserman
Example • Find the best match within a search window. from Hartley & Zisserman
Example • Initial match results from Hartley & Zisserman 188 matched features in left image pointing to locations of corresponding right image features
Example • Inliers and outliers after RANSAC from Hartley & Zisserman 89 outliers 99 inliers
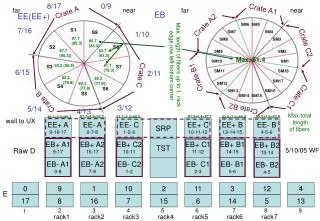
Panoramic Image Reconstruction Find features Match features Fit parametric model Application: Mosaic construction
EE7730 Stereo Vision
Stereo scene point p p’ image plane optical center p p’
Epipolar Line p’ Y2 X2 Z2 O2 Epipole Stereo Constraints M Image plane Y1 p O1 Z1 X1 Focal plane
P p p’ O’ O From Geometry to Algebra All vectors shown lie on the same plane.
P p p’ O’ O From Geometry to Algebra
Matrix form of cross product a=axi+ayj+azk a×b=|a||b|sin(η)u b=bxi+byj+bzk
The Essential Matrix Essential matrix
disparity Depth Z Elevation Zw A Simple Stereo System LEFT CAMERA RIGHT CAMERA baseline Right image: target Left image: reference Zw=0
Parallel Cameras P Z xl xr f pl pr Ol Or Disparity: T T is the stereo baseline
Stereo View Right View Left View Disparity
(xl, yl) Correlation Approach LEFT IMAGE • For Each point (xl, yl) in the left image, define a window centered at the point
Correlation Approach RIGHT IMAGE (xl, yl) • … search its corresponding point within a search region in the right image
Correlation Approach RIGHT IMAGE (xr, yr) dx (xl, yl) • … the disparity (dx, dy) is the displacement when the correlation is maximum
Stereo results • Data from University of Tsukuba Scene Ground truth (Seitz)
Results with window correlation Estimated depth of field Ground truth (Seitz)
Results with better method • A state of the art method • Boykov et al., Fast Approximate Energy Minimization via Graph Cuts, • International Conference on Computer Vision, September 1999. Ground truth (Seitz)
Applications First-down line courtesy of Sportvision
Applications Virtual advertising courtesy of Princeton Video Image