RADON TRANSFORM
RADON TRANSFORM. A small introduction to RT, its inversion and applications Jaromír Brum Kukal, 2009 . Johann Karl August Radon. Born in D ěčí n (Austrian monarchy, now North Bohemia , CZ ) in 1887 Austrian mathematician living in Vienna

RADON TRANSFORM
E N D
Presentation Transcript
RADON TRANSFORM A small introduction to RT, its inversion and applications Jaromír Brum Kukal, 2009
Johann Karl August Radon • Born in Děčín (Austrian monarchy, now North Bohemia, CZ) in 1887 • Austrian mathematician living in Vienna • Discover the transform and its inversion in 1917 as pure theoretical result • No practical applications during his life • Died in 1956 in Vienna
Actual applications of inverse Radon transform • CT – Computer Tomography • MRI – Magnetic Resonance Imaging • PET – Positron Emission Tomography • SPECT – Single Photon Emission Computer Tomography
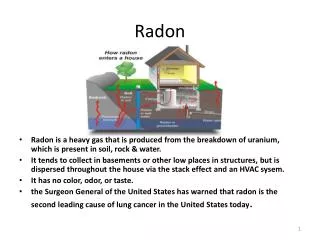
Geometry of 2D Radon transform • Input space coordinates x, y • Input function f(x, y) • Output space coordinates a, s • Output function F(a, s)
Theory of pure RT and IRT Radon transform Inverse Radon transform
Radon transform applications • Natural transform as result of measurement: • Gamma ray decay from local density map • Extinction from local concentration map • Total radioactivity from local concentration map • Total echo from local nuclei concentration map • 3D reality is investigated via 2D slices • Artificial realization: • Noise – RT – noise – IRT simulations • Image decryption as a fun • TSR invariant recognition of objects
Radon transform properties • Image of any f + g is F + G • Image of cf is cF for any real c • Rotation of f causes translation of F in α • Scaling of f in (x,y) causes • scaling of F in s • Image of a point (2D Dirac function) • is sine wave line • Image of n points is a set ofn • sine wave lines • Image of a line is a point (2D Dirac • function) • Image of polygon contour is a point set
Radon transform realization • Space domain: • Pixel splitting into four subpixels • 2D interpolation in space domain • 1D numeric integration along lines • Frequency domain: • 2D FFT of original • Resampling to polar coordinates • 2D interpolation in frequency domain • Inverse 2D FFT brings result
Inverse transform realization • Filtered back projection in space domain: • 1D HF filtering of 2D original along s • Additional 1D LF filtering along s • 2D interpolation in space domain • 1D integration along lines brings result • Frequency domain: • 2D FFT of original • Resampling to rectangular coordinates • 2D interpolation in frequency domain • 2D LF filtering in frequency domain • Inverse 2D FFT brings result
RT and IRT in Matlab • Original as a square matrix D(2n2n) • of nonnegative numbers • Vector of angles alpha • Basic rangealpha = 0:179 • Digital range is better • alpha = (0:2^N -1)*180/2^N • Extended rangealpha = 0:359 • Output matrix R of nonnegative numbers • Angles alpha generates columns of R • R = radon(D,alpha); • D = iradon(R,alpha); • D = iradon(R,alpha,metint,metfil);