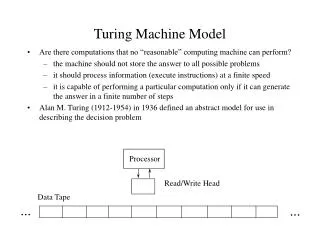
The Turing Machine Revisited
The Turing Machine Revisited. Can a conscious machine exist? (MCon guys say yes, and here’s how he’d build it). Dr. Alan Rosen. Introduction. System Engineering and Reverse Engineering TRW 1958-1992 Darwins Law. The primary assumption guiding our reverse engineering effort. Charles Darwin.

The Turing Machine Revisited
E N D
Presentation Transcript
The Turing Machine Revisited • Can a conscious machine exist? • (MCon guys say yes, and here’s how he’d build it) Dr. Alan Rosen
Introduction • System Engineering and Reverse Engineering • TRW 1958-1992 • Darwins Law
The primary assumption guiding our reverse engineering effort Charles Darwin DARWIN’S LAW “Every living organism, member of an extant specie, is genetically endowed with organs and behavioral drives, that statistically enhance its survival in its environmental niche.”
Caveats & assumptions • Controversial aspects of consciousness and emotions • Definition: “consciousness” is a subjective experience • Engineering is based on two principles in neurobiology and psychology. • A. Modalities of receptors and the law of specific nerve energy • B. William James definition of Emotion.
I Proof that a conscious machine exists • The Turing Test (to determine if a machine can “think.”): • An imitation game wherein the intelligence of the machine is tested via its ability to sustain human-like discourse. • Although the computational complexity of the Universal Turing Machine (UTM) was a sensation, Alan Turing did not prove that a UTM exhibits human-like cognitive thinking
I The UTM failed because UTM’s or modern digital computers do not operate on subjective experiences
I Computational Characteristics of each set The T-set 1. The UTM operates on symbols, numbers, memory locations, and functions of symbols, numbers, memory locations 2. Follows the computational rules of mathematics and symbolic logic. The S-set Members of the S-set: 1. Are unique to sentient biological organisms. 2. Include a subset Sx of independent variables 3. Are experience only by the subject 4. Do not follow the computational rules of the T-set
I A universal Turing machine will never generate a subjective experience if a computer can only generate members of the T-Set
I Conversion of Subjective Experiences Into Code
The significance of the NCM-circuit:A quantum leap in our understanding the adaptations of the human body and brain • Reverse Engineering sensations and emotions: Finding the NCM-circuits that generate all human feeling leads to: • An understanding of the role that feelings and emotions play in the brain’s control of the body: Sensory motor control and behavior. • The physiological design (viewed as an adaptation) of the brain and all other organic sub-systems. • Reverse engineered design of a verbally intelligent humanoid robotic system that utilizes the NCMs of sensations and emotions to control the body, think, feel, see, hear, smell, and taste. We have taken the first step: Join us in an exciting quest that will shape the 21st century as the century of humanoid robotics.
Outline of the Presentation I. Proof that a “conscious” machine exists. (Presented) • THE ROLE OF THE NCM (THE CONSCIOUSNESS MECHANISM): A FIRST STEP • II A Programmed (supervised) multitasking humanoid robot that can feel, see, and hear. a) A tactile itch robotb) A visual seeing robotc) An auditory hearing robot • III The operation of a supervised multitasking humanoid robot that can feel, see, and hear. (Equipped with a procedural memory system) • IV An autonomous (unsupervised) multi-tasking robot that uses “emotions” to guide it’s behavior. (Equipped with a procedural memory system) • V An autonomous multi-tasking robot that can comprehend verbal speech and converse-verbally with humans. (Equipped with a declarative memory system)
I The Approach: Design of A Turing Type Machine that converts S-sets into T-sets
II II. A Programmed (supervised) multitasking humanoid robot that can feel, see, and hear. • Neuronal circuit in the brain, represented by the central connections, is defined by the modality of the receptor. • This circuit, called a Neuronal Correlate of a Modality (NCM)-circuit, may be regarded as the Sensation-generating Mechanism (SgM) that generates the sensation defined by the modality of the receptor. • To design the NCM-circuit, we proposed a study of the connectivity of the modalities of the tactile, visual, and auditory sensors. This circuit is the SgM that generates the sensation defined by the modalities of the receptors
II A A tactile Itch-Robot Reverse engineering the modalities of pressure transducers (mechanoreceptors) distributed on the robotic body
II A CONSTRAINTS IMPOSED ON THE OPERATIONOF AN ITCH-SCRATCH ROBOT CONTROLLED BY THE MODALITIES OF MECHANORECEPTORS a) MONITORING: The robot must perform tactile sensory monitoring of all the pressure transducers (mechanoreceptors) uniformly distributed on the robotic body. The “robotic self monitoring” performed by the system may be analogous to biological perception of itch-type activations b) SELF LOCATION AND IDENTIFICATION: The controller must locate and identify all body parts. For example, all possible itch-points and all possible end-joints used for scratching must be located and identified by the controller. “Robotic-self” location and identification may be analogous to biological self-awareness of itch-type activations. c) SELF KNOWLEDGE (AWARENESS):The robot must be programmed/taught to perform all possible itch-scratch trajectories. A robot that learns all possible itch-scratch trajectories is said to exhibit a form of “robotic self knowledge” analogous to biological self awareness.
The controller has within it a reflection of the external coordinate frame Robotic self-identification and location (volitional constraint) The trajectory of motion is pre-planned and goal-directed with the option re-planning (obstacle avoiding) the pre-planned trajectory Training and programming and learning by means of repeated itch-scratch activations II A Derived Constraints Associated with “itch-scratch” type activations 1 2 3 4
1 II A Reverse engineered design of a neural net based coordinate frame within the controller: The controller has within it a reflection of the external coordinate frame
II A The measure of the internal coordinates is calibrated with the measure of the 3-dimensional space in which the robot is operating. 2A
II A The “Robotic Self” is fully defined in the controller. 2B
4 II A 3A Design of an itch-scratch NCM-circuit: • Hybrid neural-net/microprocessor based circuit • Configured input, Task Selector(Task-initiating Triggers TTs), and nodal map module and Sequence Stepper Module.
4 II A 3B Block Diagram of the RRC (Hybrid Circuit)
II A 4A Training a Nodal Map Module
II A Training , programming and learning by means of repeated activation 4B
II B Visual -seeing Robot The modalities of the CCD array associated with the cameras/eyes
The design procedure: Reverse engineering the modalities of the visual receptors. Note: The same design procedure is used for all modalities. All “subjective experiences” require “self knowledge.” A. The modalities and central connections of the visual sensors must give rise to a sensory form of self location and identification (of all body parts) in a coordinate frame defined by the visual receptors and located within the controller. B. The coordinate frame must be consistent with and calibrated with the tactile-itch modality coordinate frame.
II B How does binocular vision, consisting of two 2D-surface images, generate a 3D image that corresponds to the 3D objects that gave rise to that image? The correspondence problem • The reverse engineered design is based on Wheatstone’s invention of the 3D-picture stereoscope. • The superposed images (right & left eye) of the stereocope form the “cyclopean eye” of the system • The cyclopean eye is the SgM in the brain of an observer that “turns trigonometry onto consciousness.” (Pinker, 1997)
The Wheatstone stereoscope and the 3D-sensation generating mechanism. “Turns trigonometry into consciousness” Pinker 1997
The basic principle for 3D-video viewing. If the physiology of the human brain follows the laws of physics, it also must superpose the images of the right and left eye
X A visual coordinate frame within the controller.Formed by all the indexed receiving neurons that locate spots of light on the image planes within a given FOV, and all FOVs designed into the system.The Cyclopean EyeConnected to the tactile “self identification and location”-circuit. During each frame period, the convergent angle opto-sensor determinesthe convergent-depth of the image plane and the TSM transmits the cyclopean eye data to the indexed locations (at plane position-D2).
Correspondence-matching of the images of the right and left cameras by reverse engineering the convergence and accommodationreflex associated with the rectus and ciliary eye muscles.A solution to the neural net input circuit has been published by Rosen and Rosen (2007, 2006a).
X Calibrating the distance-measure in the FOV-visual space. The relative depth distance and size of the pencil-image falls within the FOV of the cyclopean eye. The image-pencil is calibrated with the depth distance and size of the object-pencil, which is determined by the tactile sensors and the tactile receiving neurons within the controller.
The visual NCM-circuit A pictorial representation of a laboratory set-up used to train a visual “itch-scratch”-robot to avoid obstacles. The robot is pictured re-planning a pre-planned itch-type trajectory in order to avoid a visual obstacle viewed along the pre-planned trajectory.
II C Auditory Hearing The modalities of microphone transducers simulating the vibrating hair cell mechanoreceptors in the ear The NCM Circuit for Auditory Perception
A sequenceof nodal transitions associated with the p-vectorcontrol signals of the mouth-lips-tongue-air flow that generates the phoneme sound of the word L I S E N The p-phoneme navigational path in the p-q nodal map for the word “listen” is presented at the bottom of the figure. Each vector direction represents a control signal of the mouth-lip-tongue-airflow configuration. The a-f-t diagram at the top of the figure is presented as a function of brain processing frame periods. It is assumed that brain processing occurs at the rate of 30 frames per second.
III The operation of a supervised multitasking humanoid robot that can feel, see, and hear. (Expansion of itch-scratch tasking to multi-tasking) Expansion of the itch-scratch-task to a multi-tasking robot. • Itch activations: Task-initiating triggers (TTs) selected by the (system designer) Task Selector module (TSM) of the system.• Visual & auditory TT-activations: are also programmed by the system designer, into the TSM.• In a supervised learning multi-tasking robot the TTs programmed into the TSM are determined by the Hierarchical Task diagram (HTD).• The Hierarchical Task Diagram (HTD) is the top level specification of the system .• The HTD may be developed, in addition to an itch scratch robot, to a postal delivery robot (HTD-determined), an ambulating robot, a ditch digging robot, and even a basketball playing robot.
III The Functional Flow OF Task-initiating Triggers (TTs) Through the TSM Pattern Recognition Circuit. Programmed Offline by Use of Top Level Specification(HTD)
III The Hierarchical Task Diagram for the sensory motor control of a multi-tasking robot
A Procedural Memory Circuit in the Brain The HTD, the “self” nodal map recording monitor and the TSM-pattern recognition circuit, are analogous to a procedural memory system in the brain. The HTD describes the tasks and the priority level TT that is assigned to each task that the robot is designed and programmed to perform. The pattern recognition circuit must be taught (programmed) to recognize the total set of TT-priority levels that have been designed into the HTD. During each frame period the pattern recognition circuit of the TSM examines the priority levels of all TTs that are recorded on the pattern recognition circuit of the TSM. Depending on the TTs observed by the robot during sensory perception, the robot performs and remembers a complex sequence of obstacle avoiding tasks all aimed at fulfilling the prime tasks shown on the HTD
The Functional Similarities of the Controller to Operation of the Brain III • Parallel processor controls all motors simultaneously with synchronization and coordination • Body sensors constantly monitor the external environment • External coordinate frame is embedded within the controller • The measure of the internal space is calibrated with external space • Motion of the limbs defined and controlled relative to the center of mass of the “robotic self” • Trajectories are pre-planned and goal directed with the option of re-planning any pre-planned trajectory. • All motors are trained simultaneously by neural networks that are initially programmed by inverse kinematics. • Trained to perform a diverse set of multi-tasking actions from an itch-scratch robot to a mail delivery robot... a sports playing robot.
Emotional-Task Initiating Triggers (TT)s An autonomous (unsupervised) multi-tasking robot that uses “emotions” to guide it’s behavior. (Equipped with a procedural memory system). IV Emotional-Task-initiating Triggers (TTs) An autonomous (unsupervised) multi-tasking robot that uses “emotions” to guide it’s behavior. (Equipped with a procedural memory system). • The Darwinian Hierarchical Task Diagram (DHTD): - The top level specification of an autonomous HTD. • Must autonomously learn to identify and prioritize all the TTs of the DHTD. -In the biological system a few TT-patterns are innate to the organism. -All other derivative TT patterns must be learned. • The Darwinian Search Engine (sensory perception), is used to find environmental contingencies (via the TSM) and identify them as TTs. • Learning and prioritization of TTs: A) All TTs are accompanied by an emotion (an upset of an autonomic subsystem) B) emotions are the modalities of upset autonomic homeostatic system (servomechanisms) C) Conditioned learning and prioritization of TTS is performed by the “emotional perception” of the modality of an upset sub-system.
IV The Darwinian Hierarchical Task Diagram (DHTD):The Top Level Specification of the RRC. Conversion of HTD to DHTD
IV What is an Emotion?William James, the father of modern psychology, wrote that an emotion is a mechanism that upsets the equilibrium of the homeostatic operation of the autonomic organic functions of the body. The Role emotions play in the design of an autonomous DHTD. •There are,literally, thousands of homeostatic subsystems in the body •Emotions are the modalities of upset homeostatic subsystems •Reverse engineered design of emotional modalities adhere to the law of specific nerve energy. -Hormonal-receptor and axonal-synaptic pathways (endocranology)
• The law of specific nerve energy: The upset signal must activate the central connections in the Self-location and Identification -circuit. • The specificity of the pathway may be either axonal-synaptic or hormonal-receptor (determined in the field of endocranology) Reverse engineering emotional modalities IV
The “emotional” factor is an essential element in the learning process: “All animals that exhibit associative conditioning, from snails to humans, seem to learn by detecting environmental contingencies (TT-tasks) rather than detecting the simple contiguity of a conditioned stimulus and unconditioned stimulus.” (Kupfermann 1991) Learning the Derivative TT - Tasks It is postulated that with repeated coupling of q-P with q-TT, the magnitude of the priority level assigned to the q-P slowly increases. This increase is determined by the magnitude of the sentient-emotional experience, and the degree of “upset” of one or more autonomic homeostatic systems After repeated coupling of q-P with q-TT, The lower branch may be triggered by the uncoupled q-P and q-P becomes a learned TT - task. In the biological TSM the rate of learning is a function of the “emotional perception”. (the change in state of the autonomic system)