Download
1 / 23
240 likes | 386 Vues
Signal Reconstruction from its Spectrogram. Radu Balan IMAHA 2010, Northern Illinois University, April 24, 2010. Overview. Problem formulation Reconstruction from absolute value of frame coefficients Our approach Embedding into the Hilbert-Schmidt space Discrete Gabor multipliers

E N D
Signal Reconstruction from its Spectrogram Radu Balan IMAHA 2010, Northern Illinois University, April 24, 2010
Overview • Problem formulation • Reconstruction from absolute value of frame coefficients • Our approach • Embedding into the Hilbert-Schmidt space • Discrete Gabor multipliers • Quadratic reconstruction • Numerical example
1. Problem formulation • Typical signal processing “pipeline”: Processing In Analysis Synthesis Out • Features: • Relative low complexity O(Nlog(N)) • On-line version if possible
x c y <·,gi> Analysis Synthesis The Analysis/Synthesis Components: Example: Short-Time Fourier Transform
x(t+kb+M:t+kb+2M-1) x(t+kb:t+kb+M-1) * * g(t) = = x(t+kb)g(t) x(t+(k+1)b)g(t) fft fft f ck+1,F-1 ck,F-1 ck,0 ck+1,0 Data frame index (k)
ck+1,F-1 ck,F-1 ck+1,0 ck,0 ifft ifft * * ĝ(t) = = +
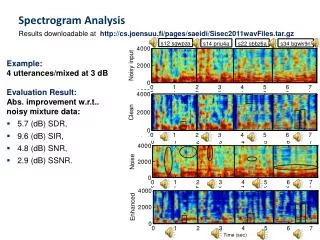
Reconstruction ck,f dk,f x |.| • Problem: • Given the Short-Time Fourier Amplitudes (STFA): • we want an efficient reconstruction algorithm: • Reduced computational complexity • On-line (“on-the-fly”) processing
Where is this problem important: • Speech enhancement • Speech separation • Old recording processing
2. Reconstruction from absolute value of frame coefficients • Setup: • H=En , where E=R or E=C • F={f1,f2,...,fm} a spanning set of m>n vectors • Consider the map: • Problem 1: When is N injective? • Problem 2: Assume N is injective, Given c=N(x) construct a vector y equivalent to x (that is, invert N up to a constant phase factor)
Theorem [R.B.,Casazza, Edidin, ACHA(2006)] For E = R : • if m 2n-1, and a generic frame set F, then N is injective; • if m2n-2 then for any set F, N cannot be injective; • N is injective iff for any subset JF either J or F\J spans Rn. • if any n-element subset of F is linearly independent, then N is injective; for m=2n-1 this is a necessary and sufficient condition.
Theorem [R.B.,Casazza, Edidin, ACHA(2006)] For E = C : • if m 4n-2, and a generic frame set F, then N is injective. • if m2n and a generic frame set F, then the set of points in Cn where N fails to be injective is thin (its complement has dense interior).
E=span{Kgk,f} Signal space: l2(Z) x Kx K Kgk,f nonlinear embedding Hilbert-Schmidt: HS(l2(Z)) 3. Our approach Recall: • First observation: Hilbert-Schmidt
Frame operator • Assume {Kgk,f} form a frame for its span, E. Then the projection PEcan be written as: where {Qk,f} is the canonical dual of {Kgk,f}.
Second observation: since: it follows:
However: • Explicitely:
Theorem [F’00] Assume {g , Lattice} is a frame for L2(R). • Then the following are equivalent: • {<.,g>g,Lattice} is a frame for its span, in HS(L2(R)); • {<.,g>g,Lattice} is a Riesz basis for its span, in HS(L2(R)); • The function H does not vanish, Short digression: Gabor Multipliers • Goes back to Weyl, Klauder, Daubechies • More recently: Feichtinger (2000), Benedetto-Pfander (2006), Dörfler-Toressani (2008)
Return to our setting. Let TheoremAssume {gk,f}(k,f)ZxZF is a frame for l2(Z). Then • is a frame for its span in HS(l2(Z)) iff for each mZF, H(,m) either vanishes identically in , or it is never zero; • is a Riesz basis for its span in HS(l2(Z)) iff for each mZF and , H(,m) is never zero.
Third observation. Under the following settings: • For translation step b=1; • For window support supp(g)={0,1,2,...,L-1} • For F2L • The span of is the set of 2L-1 diagonal band matrices.
The reproducing condition (i.e. of the projection onto E) implies that Q must satisfy: By working out this condition we obtain:
The fourth observation: We are able now to reconstruct up to L-1 diagonals of Kx. This means we can estimate Assuming we already estimated xs for s<t, we estimate xt by a minimization problem: for some JL-1 and weights w1,...,wJ. Remark: This algorithm is similar to Nawab, Quatieri, Lim [’83] IEEE paper.
Stage 1 Stage 2 |ck,0|2 I F F T Least Square Solver W0 |ck,F-1|2 WL-1 Reconstruction Scheme • Putting all blocks together we get:
Conclusions All is well but ... • For nice analysis windows (Hamming, Hanning, gaussian) the set {Kgk,f} DOES NOT form a frame for its span! The lower frame bound is 0. This is the (main) reason for the observed numerical instability! • Solution: Regularization.