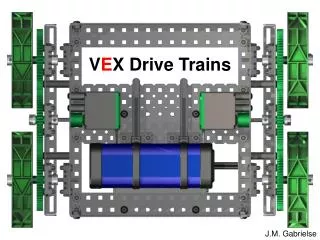
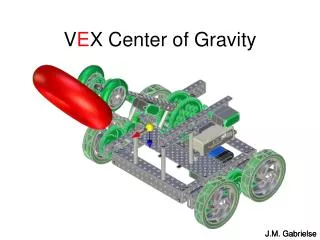
V E X Drive Trains
V E X Drive Trains. Drive Trains. Vocabulary Skid Steering (Tank Drive) Swerve Drive Holonomic (Omni Drive) Mecanum Drive. Drive Train. A robot’s drive train consists of all of the components used to make the robot move. Motors Wheels Gears. Motors.

V E X Drive Trains
E N D
Presentation Transcript
Drive Trains • Vocabulary • Skid Steering (Tank Drive) • Swerve Drive • Holonomic (Omni Drive) • Mecanum Drive
Drive Train A robot’s drive train consists of all of the components used to make the robot move. • Motors • Wheels • Gears
Motors Motors can’t turn to an exact position. Motors make attached axles spin at a set speed. Perfect for wheels and gears.
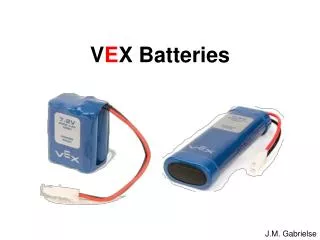
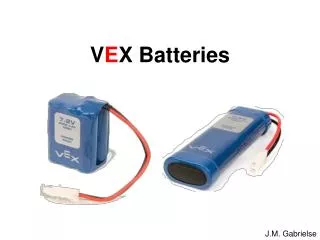
Standard Motors (269) High Strength Motors (393) • standard motors • light weight • batteries last longer • give 30% more torque or 30% more speed (if you change the internal gears) • heavy • reduce battery life J.M. Gabrielse
Tank Drive The left and right sides of the robot are powered by different motors. Each wheel of the Simplebot is directly connected to a motor. motor motor motor motor Simplebot Base
X-Wheel Drive X = how many wheels are connected to motors • Two wheel drive: two wheels are powered • Four wheel drive: four wheels are powered How many motors the robot has doesn’t matter: • The protobot has only two motors, but it is an example of four wheel drive since all four wheels are connected to motors.
Skid Steering(Tank Drive) To turn, one side goes forward and the other goes backwards.
High Traction Rounded Tread • These wheels include a smooth “grippy” tire which has high traction on smooth surfaces.
High Traction Square Tread • These wheels include a tire which works well on any surface.
High Traction Rough “Knobby” Tread • These wheels include a “knobby” tire which works great on rough terrain or loose surfaces.
Omni-Wheels • Rollers around the edges allow omni-wheels to roll sideways The 4” omni-wheels are in your kits. The 3” onmi-wheels are not included.
Swerve/Crab Drive A swerve drive robot has the ability to rotate its wheels.
Holonomic (Omni) Drive Omni wheels pointing in opposite directions allow the robot to move in any direction or spin.
Mecanum Wheel Mecanum wheels allow savvy robot designers to create drive trains capable of moving in any direction using a standard chassis shape. Simply power each wheel with a different motor and by changing the directions the wheels spin get your robot to move in any direction!