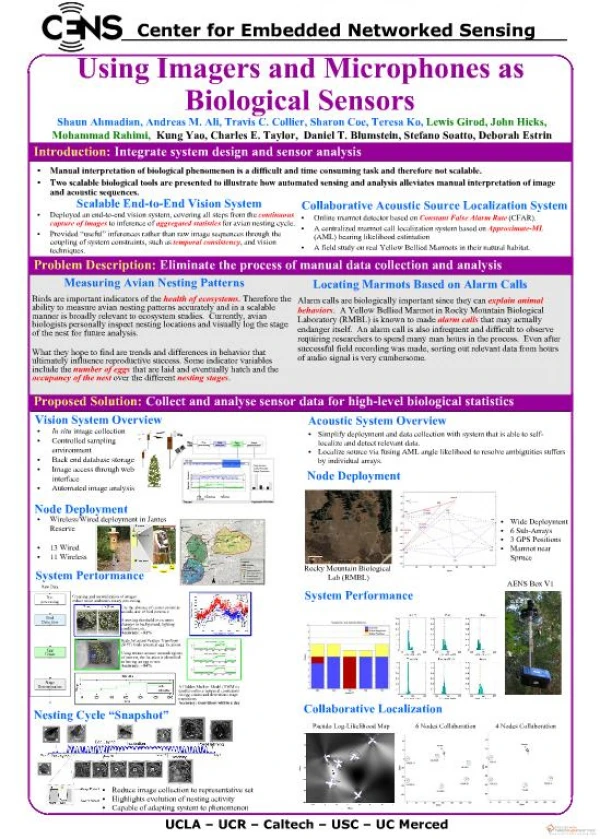
Optimizing Mounting Positions for Atacama Life Imagers: Design Review December 2003
This design review from December 2003, conducted at Carnegie Mellon University, evaluates various mounting positions for imagers used in the context of life in the Atacama region. The report discusses the pros and cons of different PTU configurations, calibration targets, and computational aspects. Recommendations are made for the ideal placement of science instruments and spectrometers on the rover, optimizing field of view and baseline distances. The appendix includes details on cameras, spectrometers, multiplexers, and other imaging devices developed at Carnegie Mellon University.

Optimizing Mounting Positions for Atacama Life Imagers: Design Review December 2003
E N D
Presentation Transcript
SPI and Context Imagers Life in the Atacama Design ReviewDecember 19, 2003 Stuart Heys Fayette Shaw Trey Smith Carnegie Mellon University Carnegie Mellon
Mounting Positions Top mast ~180 cm Mid mast ~150 cm Rear 50+ cm Low mast 50 cm Belly Rear pointed Front downward Carnegie Mellon
Hyperion 2003 SPI (2) PTU Near Nav (2) FI Plow Carnegie Mellon
SPI (2) 2-Cam Off-the-shelf PTU PTU Near + Far Nav (3) FI + VNS Workspace (2) Plow Carnegie Mellon
SPI + Far Nav + Near Nav (5) 5-Cam PTU PTU FI + VNS Workspace (2) Plow Carnegie Mellon
4-Cam PTU SPI + Far Nav (4) PTU Near Nav (2) FI + VNS Workspace (2) Plow Carnegie Mellon
KEY Narrow Wide PTU Configurations 3 Cam PTU K9 MER 5 Cam PTU 4 Cam PTU 2 Cam PTU Carnegie Mellon
Pros Off-the-shelf PTU Cons Worst data correlation Don’t like current PTU - e.g. limited range of motion Nav cams too low Pros Correlated data Cons Requires PTU built – most weight Nav cams too high Calibration target and computation Pros Fewer cameras on axle and PTU Cons One more camera Requires PTU built Carnegie Mellon
Other Considerations • Baseline • Vertical baseline takes advantage of texture (e.g. curbs) • Shorter baselines are less prone to matching error • Longer baselines are more accurate • Colinear (vertical) baseline better for stereo matching • Hazcams • Rear: engineering • Front: science • Current recommendation has neither Carnegie Mellon
Recommendation SPI + Far Nav (4) PTU Near Nav (2) FI + VNS Workspace (2) Plow Carnegie Mellon
1º VNS foreoptic Recommendation Workspace cam 75º FOV 1º VNS foreoptic FI ~30º FOV Carnegie Mellon
Recommendations • Science instruments at front of rover • Spectrometer: 1 deg foreoptic at underbelly, No laptop if possible • Chlorophyll Detector: One camera Carnegie Mellon
Appendix Carnegie Mellon
Science Mount: Pan/Tilt Unit FOV: 21.1º x 15.9º Baseline: 30 cm Verge: 1º Nav Mount: Mid mast FOV: 60º Baseline: 20 cm Haz Mount: Low mast FOV: ~90 deg (MER >120 deg) Baseline: 10 cm Workspace Mount: Underbody FOV: ~75 deg Baseline: 10 cm Cameras -- appendix Carnegie Mellon
VISNIR Spectrometer (1) • Mounting: fiber optic cable to mast and underbody • Actuation: Pan Tilt Unit (2 DOFs) • Field of view • Fiber optic: 25 deg - underbody • Foreoptic: 1 deg – mast (15, 180 available) • Computational: laptop included (weight, power on this?) • External triggering for collection of spectra via serial cable • Dimensions 33 x 11 x 41 cm • Mass: 7.2 kg + laptop • Power: 50 W (incl laptop?) Carnegie Mellon
Axiom multiplexer • Switching time: ~1s • Serial Interface: RS-232 • Command protocols: ASCII • Size: ~18 cm x 8 cm x 13 cm • Power? • Mass: ? Carnegie Mellon
Fluorescence Imager • Mount: Underbody • Actuation: x-z motion, shroud (3 DOFs) • FOV: narrow • Power: unknown • Requirements • Windows driver available or SCSI + microprocessor • Need to turn on/off, read out signals, set integration time Carnegie Mellon
Cold mirror NIR Camera source Longpass filter Visible Camera IR filter Perceptor Chlorophyll Detector • Far-field and near-field chlorophyll detection • Current system: Two cameras • FOV: 48 deg to 2.7 deg (tele end) • Power: 1.5 W per camera • Data logging: Serial • Volume: ~ 12 cm x 12 cm x 8 cm • Reduced if cameras are reoriented vertically smaller mirror • May be possible to do with one camera Carnegie Mellon