Ch 9. Rotational Dynamics
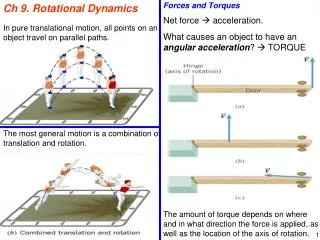
Ch 9. Rotational Dynamics. The Action of Forces and Torques on Rigid Objects. (b) Combined translation and rotation. (a) Translation. DEFINITION OF TORQUE.

Ch 9. Rotational Dynamics
E N D
Presentation Transcript
Ch 9. Rotational Dynamics The Action of Forces and Torques on Rigid Objects (b) Combined translation and rotation (a) Translation
DEFINITION OF TORQUE Direction: The torque is positive when the force tends to produce a counterclockwise rotation about the axis, and negative when the force tends to produce a clockwise rotation. SI Unit of Torque: newton · meter (N · m)
The line of action is an extended line drawn colinear with the force. The lever arm is the distance between the line of action and the axis of rotation, measured on a line that is perpendicular to both. The torque is represented by the symbol t (Greek letter tau), and its magnitude is defined as the magnitude of the force times the lever arm
Forces of the same magnitude can produce different torques, depending on the value of the lever arm.
(a) (b) (c) A force whose magnitude is 55 N is applied to a door. However, the lever arms are different in the three parts of the drawing: (a) = 0.80 m, (b) = 0.60 m, and (c) = 0 m. Find the magnitude of the torque in each case. In part c the line of action of F passes through the axis of rotation (the hinge). Hence, the lever arm is zero, and the torque is zero.
Example 2. The Achilles Tendon The ankle joint and the Achilles tendon attached to the heel at point P. The tendon exerts a force of magnitude F = 720 N. Determine the torque (magnitude and direction) of this force about the ankle joint, which is located 3.6 × 10–2 m away from point P.
= (3.6 × 10–2 m) cos 55° The force F tends to produce a clockwise rotation about the ankle joint, so the torque is negative:
Check Your Understanding 1 The drawing shows an overhead view of a horizontal bar that is free to rotate about an axis perpendicular to the page. Two forces act on the bar, and they have the same magnitude. However, one force is perpendicular to the bar, and the other makes an angle f with respect to it. The angle f can be 90°, 45°, or 0°. Rank the values of f according to the magnitude of the net torque (the sum of the torques) that the two forces produce, largest net torque first. 0°, 45°, 90°
Rigid Objects in Equilibrium CONCEPTS AT A GLANCE If a rigid body is in equilibrium, neither its linear motion nor its rotational motion changes. This lack of change leads to certain equations that apply for rigid-body equilibrium.
EQUILIBRIUM OF A RIGID BODY: A rigid body is in equilibrium if it has zero translational acceleration and zero angular acceleration. In equilibrium, the sum of the externally applied forces is zero, and the sum of the externally applied torques is zero:
A woman whose weight is 530 N is poised at the right end of a diving board with a length of 3.90 m. The board has negligible weight and is bolted down at the left end, while being supported 1.40 m away by a fulcrum. Find the forces F1 and F2 that the bolt and the fulcrum, respectively, exert on the board . W = 530 N
An 8.00-m ladder of weightWL = 355 N leans against a smooth vertical wall. The term “smooth” means that the wall can exert only a normalforce directed perpendicular to the wall and cannot exert a frictional force parallel to it. A firefighter, whose weight is WF = 875 N, stands 6.30 m from the bottom of the ladder. Assume that the ladder’s weight acts at the ladder’s center and neglect the hose’s weight. Find the forces that the wall and the ground exert on the ladder.
. P = 727 N
A bodybuilder holds a dumbbell of weight Wd. His arm is horizontal and weighs Wa = 31.0 N. The deltoid muscle is assumed to be the only muscle acting and is attached to the arm as shown. The maximum force M that the deltoid muscle can supply has a magnitude of 1840 N. The distances that locate where the various forces act on the arm. The locations from where the various forces act on the arm are shown in the figure. What is the weight of the heaviest dumbbell that can be held, and what are the horizontal and vertical force components, Sx and Sy, that the shoulder joint applies to the left end of the arm?
Check Your Understanding 2 Three forces act on each of the thin, square sheets shown in the drawing. In parts A and B of the drawing, the force labeled 2F acts at the center of the sheet. The forces can have different magnitudes (F or 2F) and can be applied at different points on an object. In which drawing is (a) the translational acceleration equal to zero, but the angular acceleration is not equal to zero, (b) the translational acceleration is not equal to zero, but the angular acceleration is equal to zero, and (c) the object in equilibrium? (a) C, (b) A, (c) B
Center of Gravity DEFINITION OF CENTER OF GRAVITY: The center of gravity of a rigid body is the point at which its weight can be considered to act when the torque due to the weight is being calculated.
Example 6. The Center of Gravity of an Arm The horizontal arm is composed of three parts: the upper arm (weight W1 = 17 N), the lower arm (W2 = 11 N), and the hand (W3 = 4.2 N). The drawing shows the center of gravity of each part, measured with respect to the shoulder joint. Find the center of gravity of the entire arm, relative to the shoulder joint.
A stationary cargo plane with its front landing gear 9 meters off the ground. This accident occurred because the plane was overloaded toward the rear. How did a shift in the center of gravity of the loaded plane cause the accident? Because of the overloading, the center of gravity has shifted behind the rear landing gear. The torque due to W is now counterclockwise and is not balanced by any clockwise torque. Due to the unbalanced counterclockwise torque, the plane rotates until its tail hits the ground, which applies an upward force to the tail. The clockwise torque due to this upward force balances the counterclockwise torque due to W, and the plane comes again into an equilibrium state, this time with the front landing gear 9 meters off the ground.
The center of gravity of an object with an irregular shape and a nonuniform weight distribution can be found by suspending the object from two different points P1 and P2, one at a time.
Newton's Second Law for Rotational Motion About a Fixed Axis FT = maT t = FTr t = maTr aT = ra The constant of proportionality is I = mr2, which is called the moment of inertia of the particle. The SI unit for moment of inertia is kg · m2.
ROTATIONAL ANALOG OF NEWTON’S SECOND LAW FOR A RIGID BODY ROTATING ABOUT A FIXED AXIS Requirement:a must be expressed in rad/s2 Although a rigid object possesses a unique total mass, it does not have a unique moment of inertia, for the moment of inertia depends on the location and orientation of the axis relative to the particles that make up the object.
Example 8. The Moment of Inertia Depends on Where the Axis Is Two particles each have a massm and are fixed to the ends of a thin rigid rod, whose mass can be ignored. The length of the rod is L. Find the moment of inertia when this object rotates relative to an axis that is perpendicular to the rod at (a) one end and (b) the center
(a) (r1=0, r2=L) (b)
Example 9. The Torque of an Electric Saw Motor The motor in an electric saw brings the circular blade from rest up to the rated angular velocity of 80.0 rev/s in 240.0 rev. One type of blade has a moment of inertia of 1.41 × 10–2 kg · m2. What net torque (assumed constant) must the motor apply to the blade?
The lever arm is just the radius of the circular rail, which is designed to be as large as possible. Thus, a relatively large torque can be generated for a given force, allowing the rider to accelerate quickly.
Conceptual Example 10. Archery and Bow Stabilizers Archers can shoot with amazing accuracy, especially using modern bows. Notice the bow stabilizer, a long, thin rod that extends from the front of the bow and has a relatively massive cylinder at the tip. Advertisements claim that the stabilizer helps to steady the archer’s aim. Could there be any truth to this claim? Explain. To the extent that I is larger, a given net torque St will create a smaller angular acceleration and less disturbance of the aim. It is to increase the moment of inertia of the bow that the stabilizer has been added. The relatively massive cylinder is particularly effective in increasing the moment of inertia, because it is placed at the tip of the stabilizer, far from the axis of rotation (a large value of r in the equation I = Smr2).
A crate that weighs 4420 N is being lifted by the mechanism. The two cables are wrapped around their respective pulleys, which have radii of 0.600 and 0.200 m. The pulleys are fastened together to form a dual pulley and turn as a single unit about the center axle, relative to which the combined moment of inertia is I = 50.0 kg · m2. A tension of magnitude T1 = 2150 N is maintained in the cable attached to the motor. Find the angular acceleration of the dual pulley and the tension in the cable connected to the crate.
m = (4420 N)/(9.80 m/s2) = 451 kg: ay = ra = (0.200 m)a.
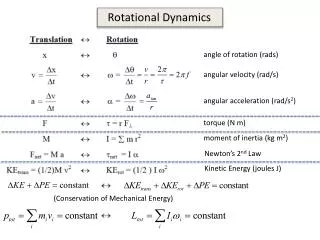
Physical Concept Rotational Translational Displacement q s Velocity w v Acceleration a a The cause of acceleration Torquet ForceF Inertia Moment of inertiaI Massm Newton’s second law St = Ia SF = ma Work tq Fs Kinetic energy ½Iw2 ½mv2 Momentum L = Iw p = mv Analogies Between Rotational and Translational Concepts
All three has the same Torque around axis to page. Three massless rods are free to rotate about an axis at their left end (see the drawing). The same force F is applied to the right end of each rod. Objects with different masses are attached to the rods, but the total mass (3m) of the objects is the same for each rod. Rank the angular acceleration of the rods, largest to smallest. Let’s say the length is 2a.
Since is the same for all 3, the product should be the same for all 3, hence large I should have smaller . IC > IB > IA A, B, C
Rotational Work and Energy DEFINITION OF ROTATIONAL WORK The rotationalworkWR done by a constant torque t in turning an object through an angle q is Requirement:q must be expressed in radians. W = Fs = Frq SI Unit of Rotational Work: joule (J)