Visual servoing using 2DOF helicopter model
Visual servoing using 2DOF helicopter model. Chayatat Ratanasawanya Min He April 6, 2010. Overview. Recall previous presentation The goal Progress report Image processing depth estimation Camera placement Obstacles Combine image processing and control Simulink models

Visual servoing using 2DOF helicopter model
E N D
Presentation Transcript
Visual servoing using 2DOF helicopter model ChayatatRatanasawanya Min He April 6, 2010
Overview • Recall previous presentation • The goal • Progress report • Image processing • depth estimation • Camera placement • Obstacles • Combine image processing and control Simulink models • Idea for the next step • Questions/Comments
Previous presentation • 4 visual-servoing structures • Dynamic position-based look-and-move • Dynamic image-based look-and-move • Position-based visual servoing (PBVS) • Image-based visual servoing (IBVS) • Implemented a simulation of the dynamic position-based look-and-move system. • Implemented a Simulink model to locate the centroid of a ping-pong ball in image.
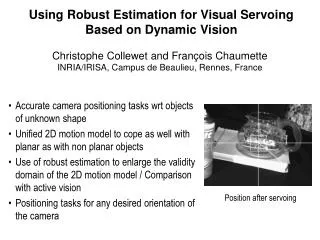
The goal • Implement the system using PBVS, IBVS, or both techniques. • Tasks to tackle: • Image processing • Depth estimation • Camera placement on the helicopter model • Combine image processing and control Simulink models. • Jacobian matrix derivation
Depth estimation • Use the diameter of the ball in image to estimate the depth Actual ball diameter db=40mm Ball diameter on image, dimg Depth, D Focal length F=538 pixel Center of projection
Obstacles • Combining our image processing model and the control model has been a challenging task. Global variable
Idea for the next step ex ey Increment in pitch and yaw angles LQR controller
Thank you • Questions/comments are welcome