Visual Servoing by Optimization of a 2D/3D Hybrid Objective Function
10 likes | 152 Vues
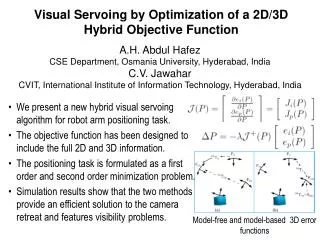
This paper presents a novel hybrid visual servoing algorithm aimed at enhancing robot arm positioning tasks. The algorithm's objective function integrates comprehensive 2D and 3D information to effectively address the positioning challenge. By formulating the task as both first-order and second-order minimization problems, we achieve significant improvements in camera retreat and feature visibility. Simulation results demonstrate the efficiency of the proposed methods, which utilize both model-free and model-based 3D error functions to optimize performance.

Visual Servoing by Optimization of a 2D/3D Hybrid Objective Function
E N D
Presentation Transcript
Visual Servoing by Optimization of a 2D/3D Hybrid Objective Function A.H. Abdul Hafez CSE Department, Osmania University, Hyderabad, India C.V. JawaharCVIT, International Institute of Information Technology, Hyderabad, India • We present a new hybrid visual servoing algorithm for robot arm positioning task. • The objective function has been designed to include the full 2D and 3D information. • The positioning task is formulated as a first order and second order minimization problem. • Simulation results show that the two methods provide an efficient solution to the camera retreat and features visibility problems. Model-free and model-based 3D error functions