Seminar on Shape Memory Alloys: Introduction & Mechanism Explained
460 likes | 606 Vues
Explore the fascinating world of Shape Memory Alloys (SMAs) - materials that can remember and recover their shape, offering unique capabilities for advanced technological systems. Learn about the history, mechanism, characteristics, and applications of SMAs in this engaging seminar.

Seminar on Shape Memory Alloys: Introduction & Mechanism Explained
E N D
Presentation Transcript
SEMINAR ON SHAPE MEMORY ALLOYS
INTRODUCTION The development of new materials is of central importance in every technological advancement. Our expectation of higher functionality along with higher reliability from our technology has made the use of advanced materials inevitable. The current trend is to replace conventional materials by what may be called “functional materials”.
NEED • With the increase in the complexity of the physical systems, there is a need to incorporate biological capabilities like self adaptability, self sensing, memory and feedback into the systems. • Shape memory alloys are functional materials exhibiting many unique properties. By exploitation of these unique properties it is possible to design systems that are more compact, more automatic and possess previously unthinkable capabilities.
DEFINITION • Shape Memory Alloys (SMAs) is applied to a group of metallic materials that when subjected to appropriate thermal procedure demonstrate the ability to return to some 'previously remembered shape. • This means that it is possible to imprint some shape in the memory of these materials.
This ability of 'memorising' a particular external shape is a direct consequence of a thermodynamically reversible transformation of the alloy's crystal structure. • In general, there are two crystal structures or phases associated with a shape memory alloy. The phase corresponding to higher temperature is called the 'austenite phase' and the one corresponding to lower temperature is called the 'martensite phase'.
In addition to the temperature induced shape memory effect, SMAs also show 'superelastic effect'. This means that if the material is kept at constant temperature in the austenite phase and mechanically loaded, it shows capability of recovering large strains. The yield strain in superelastic effect is nearly 30 times that of normal steel.
MATERIALS SHOWING SHAPE MEMORY • Most common class of shape memory alloys is Nitinol (Ni-Ti alloys). Other alloys showing this effect include CuZn, NiAl, NiMn, CuZnAl, CuZnSi, CuZnGa, NiMnAl, NiMnCr, NiMnTi, NiTiFe, MnFeSi, AuCd
HISTORY • The earliest recorded observation of the shape memory effect was by Chang and Read in 1932. They noted the reversible change in the crystal structure of AuCd. • The real breakthrough came in 1962 when the effect was found in equiatomic NiTi. Nickel Titanium alloys. • A generic name of this group of alloys was coined as Nitinol. Nitinol stands for Nickel Titanium Naval Ordinance Laboratory. In 1980, it was used by NASA in an Earth orbiting space station.
THE SHAPE MEMORY EFFECT: MECHANISM • The martensitic transformations involve shearing deformation resulting in cooperative diffusionless atomic movement. This means that the atoms in the austenite phase are not shifted independently but undergo shearing deformation as a single unit while maintaining relative neighborhood. • A one-to-one lattice correspondence is maintained between the atoms in the parent phase and the transformed phase.
HYSTERESIS LOOP • The phase transformation from martensite to austenite and back again, are described by a wide hysteresis loop, shown in Fig. • The phase transitions are characterised by four transformation temperatures: (i) As, the austenite start temperature; (ii) Af, the austenite finish temperature; (iii) Ms, the martensite start temperature; and (iv) Mf, the martensite finish temperature.
The two phases of NiTi and their transformations are depicted by the 2-dimensional matchbox model in Figure. • The stronger austenite phase, also known as the parent phase,has a cubic atomic structure and is represented by squares in Fig. • As the alloy cools to the martensite phase in a process called twinning, the crystal structure becomes rhomboidal and is represented by collapsed matchboxes. • When heated again, it returns to its original cubic form in the parent phase.
SHAPE MEMORY EFFECT : CHARACTERISTICS • One way and two way shape memory effect One way Two way
(a) Adding a reversible deformation for the one-way effect or severe deformation with an irreversible amount for the two-way. (b) heating the sample (c) and cooling it again (d) With the one way effect, cooling from high temperatures does not cause a macroscopic shape change. • The two-way shape memory effect is the effect that the material remembers two different shapes: one at low temperatures, and one at the high temperature shape.
When an external stress is applied to the alloy when it is fully martensitic, the alloy deforms elastically (curve 1). • If the stress exceeds the martensite yield strength, detwinning occurs and a large non-elastic deformation will result until the structure is fully detwinned (curve 2). • The martensite is strain recoverable up to this stage. However, further increase in stress causes the detwinned structure to deform (curve 3 ) until the external stress begins to break the atomic bonds between the martensite layers, resulting in permanent plastic deformation
For the austenite phase however, it has a higher yield strength compared to martensite. Initially, the alloy will behave elastically (curve 1 )until the stress exceeds its yield strength. • From that point onwards, plastic deformation will ensue causing unrecoverable stretching upon unloading (curves 2 and 3)
EFFECTS OF ADDITIVES AND IMPURITIES • Fe substitution in Nitinol lowers the transformation temperatures substantially. Cu does not change the shape memory properties, but it causes a reduction in hysteresis (As - Ms). Also, it improves the tensile strength and other mechanical characteristics . • The introduction of carbon in Nitinol affects the Ms temperature. TiC precipitate forms and cause slight degradation in tensile properties but improves fracture properties by rendering increase in fracture stress and strain
Excess additions of Ni (upto 1%) in Nitinol strongly depresses the transformation temperature and increase the yield strength in the austenite. • Oxygen, when higher than 0.61%, may cause an intermediate phase in Nitinol. • Nitrogen implantation improves the corrosion resistance of TiNi but does not affects theshape memory behaviour .
APPLICATION The Shape memory effect is currently being implemented in: • Coffeepots • The space shuttle • Thermostats • Vascular Stents • Hydraulic Fittings (for Airplanes)
Some examples of applications in which pseudo elasticity is used are: • Eyeglass Frames • Undergarment • Medical Tools • Cellular Phone Antennae • Orthodontic Arches
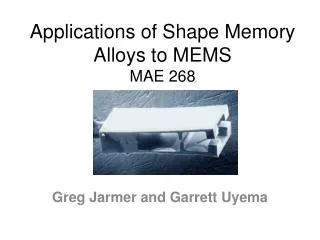
EXAMPLES Aerospace Applications • Transportation of large sophisticated apparatus such as a radio antenna to space . • SMA wire tendons can be used as embedded actuator elements to control the shapes of parts such as elevators . • With the use of quick connect-disconnect connectors, it is possible to have non-explosive triggering of auxiliary fuel tank and satellite release.
Industrial Applications • Connectors and Fasteners • Monolithic Microgripper • robotics actuators and micromanupulators • Actuator for flow –Control gas valve
BIOMEDICAL APPLICATIONS • Orthodontic Archwires: These use the superelasticity property of SMAs. When deflected, these superelastic archwires will return gradually to their original shape exerting a small and nearly constant force on the misaligned teeth. • A prime application of the free recovery property of SMAs is the blood clot filter [21]. The TiNi wire is first cooled and introduced into the vein. As it warms up to the blood temperature, it forms a filter inside the vein and catches the passing clots.
Dental wires Hip replacement Super elastic glasses Coffeepot thermostat
IMPROVING THE SPEED OF SHAPE MEMORY ALLOY ACTUATORS BY FASTER ELECTRICAL HEATING
Long Term Objective: • To obtain fast, accurate, controlled motions and forces from SMA actuators, so that we can build and experiment with low −inertia robots. • This work takes us one step in that direction, with a simple method for rapid heating of SMA.
ADVANTAGES • mechanical simplicity . • high power to weight ratio. • small size. • clean, silent, spark free operation.
WHY FOCUS ON HEATING? • The limiting factors on the speed of an actuator are the heating and cooling rates of the SMA elements. • The cooling rate can be increased by various means, including forced air cooling, oil or water cooling, and using thinner SMA wires; • The heating rate can be increased simply by passing a larger current through the element. • currents beyond a certain magnitude have the capacity to overheat the SMA, causing permanent damage.
KURIBAYASHI’S METHOD • Measure the temperature of the wire • If temperature is below threshold value • then allow large heating current • else set heating current to zero
FASTER ELECTRICAL HEATING • Measure the resistance of the wire • Calculate a maximum safe heating current as a function of measured resistance • Set the heating current to the minimum of 1.the maximum safe heating current 2.the current requested by the control system
Rthresh, • That marks the boundary between ‘safe’ resistances and ‘possibly unsafe’ resistances. • This quantity is defined to be the resistance of the hot SMA element, plus a safety margin that accounts for resistance measurement errors and strain induced resistance changes.
Maximum Safe Heating Current • Given Rthresh, we can define a maximum safe heating current, Imax(R), which is a function of the measured resistance of the SMA element.
CONCLUSION • Electrical resistance provides an indication of SMA temperature that is sufficient for preventing overheating. • Rapid heating via the proposed method yields a substantial increase in speed, without changing the cooling regime. • Next step: A better motion controller • Movie clip:- results
REFERENCES • Y. H. Teh 2003. A Control System for Achieving Rapid Controlled Motions From Shape Memory Alloy (SMA) Actuator Wires. B.Eng. Honours Thesis, Dept. Engineering, The Australian National University. • R. Featherstone & Y. H. Teh 2004. Improving the Speed of Shape Memory Alloy Actuators by Faster Electrical Heating. Int. Symp. Experimental Robotics. • Y. H. Teh & R. Featherstone 2004. A New Control System for Fast Motion Control of SMA Actuator Wires. Shape Memory And Related Technologies. • http://www.dynalloy.com/TechnicalData.html.