6.1 Eigenvalues and Diagonalization
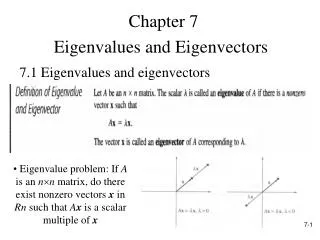
6.1 Eigenvalues and Diagonalization. Definitions. A is n x n. is an eigenvalue of A if AX = X has non zero solutions X (called eigenvectors ) If is an eigenvalue of A, the set E = E (A) = {X | X in n , AX = X} is a vector space called the eigenspace associated w/

6.1 Eigenvalues and Diagonalization
E N D
Presentation Transcript
Definitions A is n x n. is an eigenvalue of A if AX = X has non zero solutions X (called eigenvectors) If is an eigenvalue of A, the set E = E(A) = {X | X in n, AX = X} is a vector space called the eigenspace associated w/ (i.e. E is all eigenvectors corresponding to & 0 vector) is eigenvalue if E has at least one non-zero vector. Can also write AX = X as (In - A)X = 0
Example Show that = -3 is an eigenvalue of A, and find the eigenspace E-3. Write out (In - A)X = 0 and solve. Get: So it is an eigenvalue since there is a non-zero solution. Eigenspace is:
Discussion Now we have (In - A)X = 0, and is an eigenvalue iff there exists a nonzero solution X. Recall that a matrix U is invertible iff UX = 0 implies X = 0. So, since we are looking for a nonzero solution above, (In-A) cannot be invertible for to be an eigenvalue. So det (In-A) =0.
Definition The characteristic polynomial of the n x n matrix A is: cA(x) = det(xI - A)
Theorem 1 A (n x n). The eigenvalues of A are the real roots of the characteristic polynomial of A --the real numbers satisfying: cA() = det(In - A) = 0 The eigenspace E = {X | (I - A)X = 0} consists of all solutions to a system of n linear equations in n variables. The eigenvectors corresponding to are the nonzero vectors in the eigenspace.
Summary So there are two issues: finding eigenvalues, and finding eigenspaces (and eigenvectors). Finding the eigenvalues can be difficult - won’t do much here. Spend more time dealing with eigenspaces.
Example Find the characteristic polynomial, eigenvalues, and eigenspaces of A: Set up cA(x) = det (xI - A) Eigenvalues will be the roots of the polynomial as those will give us where det is 0. Then use those to find eigenspace: X such that ( I-A)X=0
Example If A is a triangular matrix, show that the eigenvalues of A are the entries on the main diagonal. Proof: cA(x) = det (xI - A) = det ( a triangular matrix) = product of entries on main diagonal of (xI - A). The matrix showing entries on main diagonal is: det = (x-a11)(x-a22)…(x-ann) So eigenvalues are{a11,a22,…,ann}
Example Show that A and AT have the same characteristic polynomial and thus the same eigenvalues. Proof: From chapter 3, we know that a matrix and its transpose will have the same determinant.
Theorem 2 If A is a real symmetric matrix, each root of the characteristic polynomial cA(x) is real. (to be proven later) Show this is true for a (2 x 2): Recall that we can determine the nature of the roots from the discriminant: (b2-4ac) = (a+c)2-4(ac+b2) = a2+c2+2ac-4ac+4b2 =a2-2ac+c2+4b2 = (a-c)2 + 4b2 which is always pos so real roots.
Similar Matrices A, B (n x n) are similar (we say A~B) if B = P-1AP holds for some invertible matrix. P is not unique.
Example Find P-1AP in the following case, then compute An. We are able to find a similar matrix B. Then P-1AP=B. So A = PBP-1 So A2=(PBP-1)(PBP-1)=PB2P-1 Generally An=PBnP-1 Life is made easy is B is diagonal since we just raise entries to n.
Interesting Fact Similar Matrices will have the same determinant. Proof: P-1AP = D det(D) = det (P-1AP) = (detP-1)(detA)(detP) = (1/detP)(detA)(det P) = det A.
Example Show that A and B are not similar. Just need to show that they do not have the same determinant.
Trace The trace of a square matrix A (tr A) is the sum of the entries on the main diagonal of A.
Theorem 3 A,B (n x n), k is a scalar: 1. tr(A + B) = tr A + tr B and tr(kA) = k tr A 2. tr (AB) = tr (BA) Proof: 1. (homework) 2.
Theorem 4 If A~B, they have the same determinant, the same rank, the same trace, the same characteristic polynomial, and the same eigenvalues. (similarity invariants) Proof: Already shown that they have the same determinant. Rank: Have B = P-1AP rank (B) = rank (P-1AP) = rank(AP)=rankA since P is invertible (and using cor 4 of thm 4 in 5.5) tr B = tr (P-1AP) = tr[(AP)P-1] = tr (A) (uses thm 3)
Theorem 4 - cont Characteristic polynomial cB(x) = det (xI - B) = det(xI - P-1AP)=det(P-1xIP - P-1AP) (since xI = P-1xIP -- since xI is diagonal) = det [P-1(xI - A)P]=(1/detP)(det(xI-A))(det P) = det(xI-A) = cA(x) Eigenvalues: all matrices with the same characteristic poly will have the same eigenvalues since the eigenvalues are the roots of the characteristic polynomial.
Fact The invariants do not imply similarity. Ex. Have same det,tr,rank,characteristic poly, eigenvalues, but are not similar since P-1IP = I ≠ A
Theorem 5 A,B,C (n x n). Then: 1. A~A for all A. 2. If A ~ B, then B~A 3. If A ~ B and B ~ C, then A~C. Proof of 2 (others follow): A~B B = P-1AP Let Q = P-1, then B = QAQ-1, so A= Q-1BQ Which means that B ~ A.
Use of thm 5 Proving similarity is not always easy. But if we can find a simple (often diagonal) matrix to which both A and B are both similar, then: A~D and B~D means D~B by (2) and A~B then by (3)