Accelerometer approaches
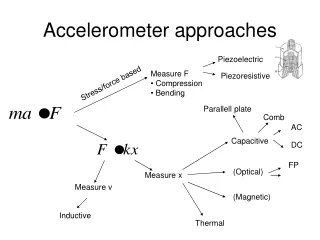
Learn about various sensor technologies like piezoelectric, piezoresistive, and capacitive for stress/force measurement in compression and bending applications. Explore factors like sensitivity, spring constants, and resonance frequency analysis in accelerometer design. Gain insights into Q-factor definition and damping contributions in sensor systems.

Accelerometer approaches
E N D
Presentation Transcript
Accelerometer approaches Piezoelectric • Measure F • Compression • Bending Piezoresistive Stress/force based Parallell plate Comb AC Capacitive DC FP (Optical) Measure x Measure v (Magnetic) Inductive Thermal
Partitioning and choice of variables (z,v) Find values for the parameters (m,k,γ) Couple Analyze Parameter extraction z
Utbøyning Quasi static sensitivity of a displacement based accelerometer Mechanical part of the sensitivity z
Doubly clamped beam with point load at midpoint • Spring constant: • z-central beam displacement • W beam width (poly thickness) • H beam thickness (lithography) • Stiffness of folded spring: 2.8 N/m • Stiffness of two springs: 5.6 N/m • Spring softening due to applied voltage gives: 5.2 N/m
Mass and mechanical sensitivity Estimate: Analog devices: Mechanical sensitivity: sm=
Partitioning and choice of variables (z,v) Find values for the parameters (m,k,γ) Couple Analyze Dynamics z
Position – velocity - acceleration Oscillatory motion • Position • Velocity • Acceleration
x Second order system with forced oscillations
Block function from Senturia x/f v/f
Resonance frequency For zero damping, the response diverges when hence, we introduce the resonance frequency:
Q-factor appears as • Stored energy divided by energy dissipated during one cycle at resonance • Number of oscillations before the amplitude is reduced by a factor 1/e • Eigenfrequency divided by the Full Width at Half Maximum for the transfer function squared (power)
Experiment Q,f
Q from power function FWHM HM f0
Contributions to damping = 5 = 7 µN/(m/s)
Consequence of damping Brownian motion of the accelerometer results in: Force noise: Equivalent acceleration Measured noise:
Capacitance Capacitance from parallel plate approximation: • Capacitance including fringing fields about 100 fF