May 11, 2005
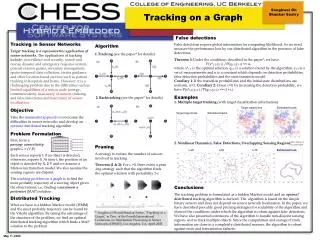
Songhwai Oh Shankar Sastry. Tracking on a Graph. False detections False detections require global information for computing likelihood. So we need measure the performance loss by our distributed algorithm in the presence of false detections.

May 11, 2005
E N D
Presentation Transcript
Songhwai Oh Shankar Sastry Tracking on a Graph False detections False detections require global information for computing likelihood. So we need measure the performance loss by our distributed algorithm in the presence of false detections. Theorem 3: Under the conditions described in the paper*, we have P(x*1:T,y1:T) /P(q1:T,y1:T) <= , where x*1:T is the optimal solution, q1:T is a solution found by the algorithm, y1:T is a set of measurements and is a constant which depends on detection probabilities, false detection probabilities and the state transition model Corollary 1: If the transition probabilities and the initial state distributions are uniform, =1. Corollary 2: Given >0, by increasing the detection probability, we have P(x*1:T,y1:T) /P(q1:T,y1:T) <= (1+) • Tracking in Sensor Networks • Target tracking is a representative application of sensor networks. The applications of tracking include: surveillance and security, search and rescue, disaster and emergency response system, pursuit evasion games, inventory management, spatio-temporal data collection, visitor guidance and other location-based services such as patient tracking in hospitals and home. However, it is a challenging problem due to the difficulties such as limited capabilities of a sensor node (energy, communication), inaccuracy of sensors (missing and false detections) and inaccuracy of sensor localization. • Objective • Take the minimalist approach to overcome the difficulties in sensor networks and develop an optimal distributed tracking algorithm • Problem Formulation • First, form a • passage connectivity • graph G = (V,E) • Each sensor reports 1 if an object is detected, otherwise, reports 0. At time t, the position of an object is denoted by Xt2 V and we assume a Markovian transition model. We also assume the sensing regions are disjoint. • The tracking problem on a graph is to find the most probably trajectory of a moving object given the observations,i.e., finding a maximum a posteriori (MAP) solution • Distributed Tracking • What we have is a hidden Markov model (HMM) and the most probably trajectory can be found by the Viterbi algorithm. By taking the advantage of the structure of the problem, we find an optimal distributed tracking algorithm which finds a MAP solution to the problem Algorithm Tracking (see the paper* for details) Examples 1. Multiple target tracking (with target classification information) 2. Backtracking (see the paper* for details) Target trajectories Estimated tracks Target trajectories Estimated tracks state space is not extended 2. Nonlinear Dynamics, False Detections, Overlapping Sensing Regions Pruning A strategy to reduce the number of sensors involved in tracking Theorem (1 & 2): For >0, there exists a prun -ing strategy such that the algorithm finds the optimal solution with probability 1- t=25 t=50 t=75 Estimated track Conclusions The tracking problem is formulated as a hidden Markov model and an optimaldistributed tracking algorithm is derived. The algorithm is based on the simple binary sensors and does not depend on sensor network localization. In the paper, we have described provably good pruning strategies for scalability of the algorithm and showed the conditions under which the algorithm is robust against false detections. We have also presented extensions of the algorithm to handle non-disjoint sensing regions and to track multiple objects. Since the computation and storage of track information are done in a completely distributed manner, the algorithm is robust against node and transmission failures. * Songhwai Oh and Shankar Sastry, "Tracking on a Graph," in Proc. of the Fourth International Conference on Information Processing in Sensor Networks (IPSN05), Los Angeles, CA, April 2005. May 11, 2005