Solving Linear Equations with QR Factorization and Least Squares Optimization
150 likes | 259 Vues
This guide covers the method of solving systems of linear equations of the form Mx = b using QR Factorization. It discusses the conditions for the existence and uniqueness of solutions, focusing on the role of linear independence among the matrix columns. Additionally, it explains how QR decomposition transforms the problem into a triangular format, allowing for efficient least-squares solutions. The content also includes MATLAB code for applying Normal Equations and discusses the Gram-Schmidt orthogonalization process for obtaining Q.

Solving Linear Equations with QR Factorization and Least Squares Optimization
E N D
Presentation Transcript
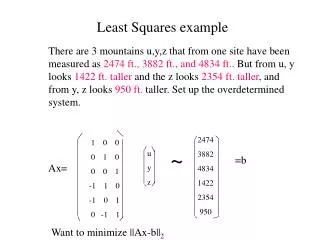
Systems of linear equations • Problem to solve: M x = b • Given M x = b : • Is there a solution? • Is the solution unique?
Systems of linear equations Find a set of weights x so that the weighted sum of the columns of the matrix M is equal to the right hand side b
Systems of linear equations - Existence A solution exists when b is in the span of the columns of M A solution exists if: There exist weights, x1, …., xN, such that:
Systems of linear equations - Uniqueness Suppose there exist weights, y1, …., yN, not all zero, such that: Then: Mx = b Mx + My= b M(x+y) = b A solution is unique only if the columns of M are linearlyindependent.
QR factorization 1 • A matrix Q is said to be orthogonal if its columns are orthonormal, i.e. QT·Q=I. • Orthogonal transformations preserve the Euclidean norm since • Orthogonal matrices can transform vectors in various ways, such as rotation or reflections but they do not change the Euclidean length of the vector. Hence, they preserve the solution to a linear least squares problem.
QR factorization 2 Any matrix A(m·n) can be represented as A = Q·R ,where Q(m·n) is orthonormal and R(n·n) is upper triangular:
QR factorization 2 • Given A , let its QR decomposition be given as A=Q·R, where Q is an (m x n) orthonormal matrix and R is upper triangular. • QR factorization transform the linear least square problem into a triangular least squares. Q·R·x = b R·x = QT·b x=R-1·QT·b Matlab Code:
Normal Equations Consider the system It can be a result of some physical measurements, which usually incorporate some errors. Since, we can not solve it exactly, we would like to minimize the error: r=b-Ax r2=rTr=(b-Ax)T(b-Ax)=bTb-2xTATb+xTATAx (r2)x=0 - zero derivative is a (necessary) minimum condition -2ATb+2ATAx=0; ATAx = ATb; – Normal Equations
Normal Equations 2 ATAx = ATb – Normal Equations
Least squares via A=QR decomposition A(m,n)=Q(m,n)R(n,n), Q is orthogonal, therefore QTQ=I. QRx=b R(n,n)x=QT(n,m)b(m,1) -well defined linear system x=R-1QTb Q is found by Gram=Schmidt orthogonalization of A. How to find R? QR=A QTQR=QTA, but Q is orthogonal, therefore QTQ=I: R=QTA R is upper triangular, since in orthogonalization procedure only a1,..ak (without ak+1,…) are used to produce qk
Least squares via A=QR decomposition 2 Let us check the correctness: QRx=b Rx=QTb x=R-1QTb
QR Factorization – Minimization ViewMinimization Algorithm For i = 1 to N “For each Target Column” For j = 1 to i-1 “For each Source Column left of target” end end Orthogonalize Search Direction Normalize