3.4. Molecular motors
640 likes | 936 Vues
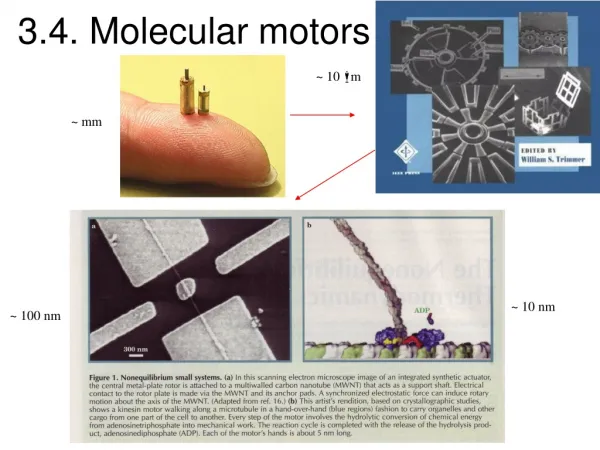
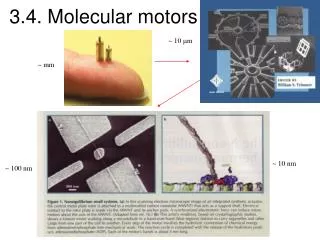
3.4. Molecular motors. ~ 10 m m. ~ mm. ~ 10 nm. ~ 100 nm. Consider the energetics and size of an engine. 3.4.1 Brownian motors.

3.4. Molecular motors
E N D
Presentation Transcript
3.4. Molecular motors ~ 10 mm ~ mm ~ 10 nm ~ 100 nm
3.4.1 Brownian motors Motors are devices which convert stored energy (chemical, electrical, thermal, solar….) - sometimes called fuel - into mechanical (kinetic) energy of motion (Translation, rotation, oscillation…..) Macroscopic motors obey the laws of thermodynamics (in particular Carnot, no perpetuum mobile ….). The “operating parameters” of the motor (P,T, fuel density…) may vary in time because of the operation principle (e.g. cyclic machines) but the random fluctuations of those parameters are negligible.
Motors are systems (a bit) away from thermodynamic equilibrium (eg temperature gradient and heat flow in the Carnot machine), but they may operate in a steady state (no change of parameters). This requires a steady in-flow of fuel. Question: What happens if the motor gets smaller and smaller? Viscosity dominates - less power (dissipation rate) Therml fluctuations become dominant Totally new modes of operation
Let's look at typical forces in a molecular motor E/a = f Smallest measurable forces: Langevin forces responsible for the Brownian motion of bacteria, pollen grains, and other small objects in water at room temperature. The average force buffeting a bacterium every second is comparable to its weight, about 10-14 N = 10 fN.
Typical forces of molecular motors (convert chemical energy from adenosine triphosphate (ATP) into mechanical work). ATP is the common source of stored chemical energy in all life. Hydrolysis of one ATP molecule yields an energy of ~14 kBT (at room temperature ~ 6 × 10-20 J). Thus, at the molecular dimensions ~ 10 nm, the characteristic forces of such motors are ~10-11 N (10 pN).
Cohesion forces associated with hydrophobic interactions and cooperative hydrogen bonding. Such interactions are essential for the stability of biomolecules and their native folded configurations. These forces are of order 10-10 N, the typical force required to break a noncovalent bond and denature a protein. The strongest forces at the molecular level are those required to break covalent bonds with dimensions ~ 0.1 nm and typical binding energies of 1 eV, giving 10-9 N.
Nature has invented many molecular motors (nano-motors). Here are a few (!) examples: 3 2 exercise 4 5 cf 3.5
The basic phenomenon is the separation of densities amplitude a frequency f J. Eggers, PRL 83, 5322 (1999).
How does the separation happen? Let's suppose we have an ideal Gas: Then we have a barometric density with height. n(z) = g<N>/T exp(-gz/T) Where the Temperature T is given by: T = <v2>/3 = 2m(af)2/D<N> The diffusion constant D basically depends on the restitution coefficient e
Consider the flux through a boundary With a barometric density the flux through a hole at height h will be: F ~ n(h) v (h) ~ <N>3/2 exp(-4B<N>) And for an ideal system of smooth, round particles with radius r, the diffusion constant can be calculated, such that: B = 4p r2 (1-e)2 gh / (af)2
Steady state flux Now in the steady state, the fluxes between the compartments have to be equal, while the total number of particles is conserved: F(n1) = F(n2) , n2 = 1 – n1 n13/2 exp(-4Bn1) = (1 – n1)3/2 exp(-4B(1-n1)) exp(-4B(1/2-n1)) n1 = 1 + exp(-4B(1/2-n1)) With the solution n1 = 1/2, but also n1 = 1,0 for large B
Bifurcation point Let's look at the stability of the solution n1 = 1/2, so set n1 = 1/2 + e exp(4Be) 1/2 + e = 1 + exp(4Be) Which after a little algebra gives 2e = tanh(2eB) Such that the solution is unstable for B >1and we have a pitchfork bifurcation.
Compares well to experiment Remember: B = 4p r2 (1-e)2 gh / (af)2 K. Van der Weele et al., EPL 53, 328 (2001).
How can these motors work despite of thermal noise? Diffusing ratched model for single headed kinesin
A diffusing particle in thermodynamic equilibrium in a symmetric potential does not give directed motion Proba. distrib. because diffusion Activated hopping rate ~ e-EB/kT EB A diffusing particle in thermodynamic equilibrium in a asymmetric potential does not give directed motion either Activated hopping One needs a switching of the potential from high to low (which consumes energy in a dissipative system) in order to get directed motion (system out of equilibrium). More less few diffusion particles confined
3.4.2 Actin-myosin motor How muscles contract
The motions of muscles are driven by molecular motors that move unidirectionally along protein polymers (actin or microtubules). • Myosin and kinesin both convert chemical energy into motion • Each of the 350 heads of myosin form about 5 cross-bridges per second
Force measurements on singe actin-myosin motor • Force amplitude typically 4 pN • discrete force strokes • - load-independent force • - average step size of about 11 nm very efficient motor directed motion out of random diffusion of ATP
Cross-bridge Kinetics • In order for the myosin head to bind to the actin filament, the myosin must act like a spring • The elastic energy required to extend or compress the spring is supplied by thermal activation
Thermodynamics of the Molecular Motor • ∆G’0 is the increase in the standard free energy when each of the components has 1 M concentration • ATP is present at higher concentrations than ADP in muscle • The free energy is negative in these conditions, making the cross-bridge formation spontaneous
Steady-state Tension and Stretch Activation • Tension increases as filament displacement increases up to a mechanical maximum at 20 nm (ratchet slips) • Hydrolysis rate of ATP increases as filament displacement increases up to a maximum of 7 nm
Filament Sliding: The Motor as a Ratchet • To model skeletal muscle, we must consider multiple attachment sites due to the helical structures of actin and myosin • Lower phosphate concentration exists during the stretching stages, so the tension is higher • When the tension is completely removed from the system the filament quickly returns to its original length, but when tension is still applied the velocity is slower because it must work against the tensile force
Fluorescence imaging of labelled cargo on myosin allows a step determination
Controlled motion of actin filaments on myosin carpets (using ATP as fuel)
Movement of actin filaments along the PTFE ridges coated with skeletal muscle myosin S1
The patterns shown here biased actin filament movement confining it to be unidirectional.
3.4.3 Kinesin - microtubule system The kinesin-microtubule system is responsible for the movement of proteins and vesicles within cells.
Kinesin transporting a colloid colloid
Measure the power consumption one kinesin step of 8 nm consumed one ATP
Mechanics of the kinesin-microtubule system Kinesin walks towards the plus-end of microtubules (right side of picture). The motor domains attach to successive beta-Tubulin subunits spaced 8 nm apart, and each head advances 16 nm at a time. The two heads must move in a non-equivalent fashion in order to avoid twisting the stalk. The upper (C-terminal) part of the coiled-coil neck is shown to be permanently connected since it has a high coiled-coil potential, similar to a leucine zipper. The lower part of the neck is shown to open and close reversibly in order to allow the heads to detach, move, and reattach. This is coupled to a reorientation of the linker region (yellow) between the neck helix and the motor domain.