Advancements in Smart Wheelchair Technology: A Collaborative Approach for Enhanced Mobility
50 likes | 162 Vues
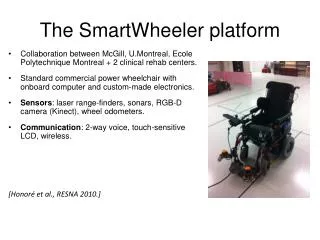
The SmartWheeler platform is a cutting-edge collaboration between McGill University, U. Montreal, Ecole Polytechnique Montreal, and two clinical rehabilitation centers. It features a standard commercial power wheelchair equipped with an onboard computer and custom electronics, incorporating various sensors like laser range finders, sonars, and RGB-D cameras. The platform aims to improve navigation through advanced obstacle detection and mapping techniques, using integrated algorithms and user interaction models. Ongoing research focuses on socially adaptive navigation and machine learning to enhance user experience in diverse environments.

Advancements in Smart Wheelchair Technology: A Collaborative Approach for Enhanced Mobility
E N D
Presentation Transcript
The SmartWheeler platform • Collaboration between McGill, U.Montreal, EcolePolytechnique Montreal + 2 clinical rehab centers. • Standard commercial power wheelchair with onboard computer and custom-made electronics. • Sensors: laser range-finders, sonars, RGB-D camera (Kinect), wheel odometers. • Communication: 2-way voice, touch-sensitive LCD, wireless. [Honoré et al., RESNA 2010.]
Overall software architecture Two primary components of cognitive robotic system: Interaction Manager and Navigation Manager
Current system:classical mapping path planning Obstacle detection: Fusion of laser, sonar and RBG-D data to detect standard obstacles, including glass walls. Next challenge is to detect “negative” obstacles (holes, descending ramp) Mapping and localization: Particle filtering SLAM algorithms, using laser data, integrated in ROS. Local control: Pre-programmed behaviors for simple tasks (wall following, door traversal) Global path planning: Deterministic search algorithm to achieve point-to-point navigation in discretized statespace.
Ongoing research:Socially adaptive navigation Approach: - Extract information about dynamic obstacles from RBG-D camera. - Acquire training data containing trajectories of driving in crowds from a human expert. - Apply machine learning methods on the training data to learn a policy that matches dynamic features to control actions. [Kim and Pineau., RSS 2013.]
Speech-based user interaction Using a Partially Observable Markov Decision Process (POMDP) to model the dialogue interaction and select the robot response (right column). [Atrash et al., Int.J. Social Robotics. 2009.]