Download
1 / 4
40 likes | 197 Vues
Distributed Sensing and Control for Mobile Robot: Automated Guided Vehicle. Final Project MAE 576 Group D. Stations. 1. 2. 8. R. 3. 7. 6. 4. X. 5. Y. Communication Flow. Requests & Verification. Matlab. Base Station. Instructions. Requests. Requests. User. Instructions.

E N D
Distributed Sensing and Control for Mobile Robot: Automated Guided Vehicle Final Project MAE 576 Group D
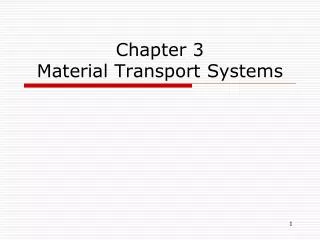
Stations 1 2 8 R 3 7 6 4 X 5 Y
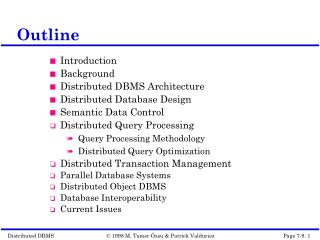
Communication Flow Requests & Verification Matlab Base Station Instructions Requests Requests User Instructions Verification Robot
Modes of Operation • Real –Time Control of AGV • User directs the robot to different stations through push-buttons on the Base Station (Basic Stamp). • Robot waits for instructions after every move. • Pre-Defined Path • User defines a sequence of stations which should be traversed. • Robot completes the defined path before accepting any further instructions. • User Defined Location • User can define any location in the World Co-ordinate system to which robot should traverse.