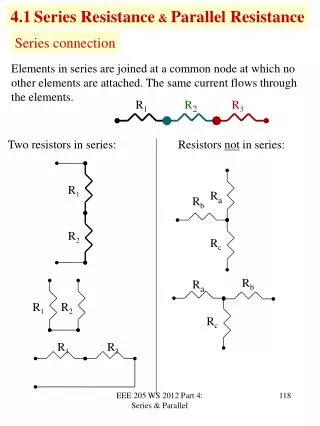

R 3
E N D
Presentation Transcript
R3 Ethan Hall Michael Kelton Greg Wegman Vashisht Lakhmani
Description • Mars Science Lab Rover Replica • Circuit Design Points of Interest • Driving the motors • Steering the motors • Charging the batteries • Sensors • Wireless communication
Theory of Operation • Microcontroller • Power Supply • Motor Control Circuit • Sensor Circuit • Wireless Communication Breakout
Microcontroller • LPC1768 • 32 bit ARM Cortex M3 • 512 kB Flash; 32kB SRAM • I2C; UART; USB; PWM • Run at 3.3V
Power Supply • 2 Batteries in Series • Motors run at 5V • 3.7V LiPoly batteries in series = 7.4V • 2 charging pads in series – 10V for charging • Charging Chip (MCP73213) • Fuel Gauge (DS2782) • Utilize 5V and 3.3V Linear Regulator (AP1117-Y50G & AP1117-Y33G)
Motor Control Circuit • 5 volt operation • 4 H-Bridges (BD6211F-E2) • 4 MOSFETs • Turns signal for motor on or off • One for each motor
Sensor Circuit • 3.3V Operation • 4 Sonar Sensors (MB1240) • ATD • Accelerometer (LIS331) • I2C • Compass (HMC5883LSMD) • I2C
Wireless Breakout • WiFly GSX Breakout (WRL-10050) • 3.3V Operation • UART