Experimental Analysis of Ranging Accuracy in Wireless Sensor Networks Using Mica2 Motes
10 likes | 142 Vues
This study explores the challenges of node localization in wireless sensor networks (WSNs) through acoustic ranging techniques using Mica2 motes. We conducted experiments to evaluate the accuracy of distance estimates affected by echoes and reflections in a 3D deployed environment. Our findings revealed inconsistent results across different motes and highlighted the Gaussian distribution of ranging errors, suggesting that indoor ranging can result in significant inaccuracies. Future work aims to develop a more consistent code-matching ranging system to improve accuracy.

Experimental Analysis of Ranging Accuracy in Wireless Sensor Networks Using Mica2 Motes
E N D
Presentation Transcript
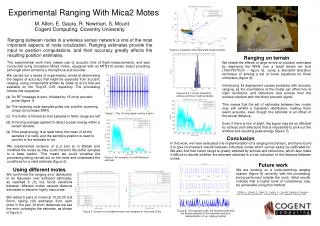
Experimental Ranging With Mica2 Motes M. Allen, E. Gaura, R. Newman, S. Mount Cogent Computing, Coventry University Ranging between nodes in a wireless sensor network is one of the most important aspects of node localization. Ranging estimates provide the input to position computations, and their accuracy greatly affects the resulting position estimates. Figure 5. Our experimental terrain Figure 4. Lateration with inaccurate measurements Ranging on terrain We tested the effects of large errors on position estimates by deploying the WSN over a small terrain we built (100x70x70cm – figure 5), using a standard lateration technique of solving a set of linear equations for three unknowns (figure 4). Introducing 3d deployment causes problems with acoustic ranging, as the orientations of the motes can affect line of sight conditions, and reflections and echoes from the surface interfere with the direct acoustic signal. This means that the set of estimates between two motes may still exhibit a Gaussian distribution, making them seem accurate, even though the estimate is an offset of the actual distance. Even if there is line of sight, the signal may be so affected by echoes and reflections that is impossible to pick out the window and resulting peak energy (figure 7). The experimental work here makes use of acoustic time of flight measurements, and was conducted using Crossbow Mica2 motes, equipped with an MTS310 sensor board providing (amongst other sensors) a microphone and sounder. We carried out a series of experiments, aimed at determining the degree of accuracy that might be expected from acoustic ranging, using components written by Sallai et al [1] that are available on the TinyOS CVS repository. The processing follows this sequence: Figures 6 & 7. Errors caused by echoes and line of sight problems An RF message is sent, followed by 16-chirp acoustic pulse (figure 1) The receiving mote samples pulse into a buffer, summing chirps (to increase SNR) The buffer is filtered so that samples in 5kHz range are left A moving average applied to detect a peak energy within a certain window If the peak energy is at least twice the mean of all the samples it is valid, and the sample's position is used to convert to the estimate to cm Figure 1. The 16 chirp signal sent by a mote Conclusion In this work, we have evaluated one implementation of a ranging mechanism, and have found it to give inconsistent results between individual motes which cannot easily be calibrated for. We also find that indoor range is greatly affected by echoes and reflections, which also make it difficult to decide whether the estimate obtained is a true indication of the distance between motes. We implemented versions of (c,d and e) in Matlab and modified the motes so they could transmit the buffer samples to a base station. This meant we could visualise the processing being carried out on the mote and understand the conditions for a valid estimate (figure 2) . Figure 2. An example of a valid distance estimate Future work We are working on a code-matching ranging system (figure 8) currently with the processing being performed outside the mote. Initial results indicate that a higher level of consistency may be achievable using this method. Using different motes We confirmed the ranging error distribution to be Gaussian over sufficient estimates, as reported in [1], but found variations between different motes caused distance estimates to become highly inaccurate. We tested 5 pairs of motes at 10,20,30 and 50cm, taking 100 estimates from each mote in the pair. At short distances we see the error outweighs the estimate, as shown in figure 3. [1]Sallai J., Balogh G., Maroti M., Ledeczi A., “Acoustic Ranging in Resource Constrained Sensor Networks”, Technical Report, ISIS, Vanderbilt University, 2003 Figure 8. The expected code, the received code and the filtered samples of the received code as a demonstration of our ranging method Figure 3. Evolution of combined mean over samples at 10cm and 50cm