Download
1 / 18
180 likes | 283 Vues
Impacts of atmospheric attenuations on AltiKa expected performances. J.D. Desjonquères (1) , N. Steunou (1) A. Quesney (2) P. Sengenes (1) , J. Lambin (1) J. Tournadre (3) (1) CNES, France (2) NOVELTIS, France (3) IFREMER, France. Contents. Introduction Method of simulation

E N D
Impacts of atmospheric attenuations on AltiKa expected performances J.D. Desjonquères (1), N. Steunou(1) A. Quesney(2) P. Sengenes(1), J. Lambin(1) J. Tournadre(3) (1) CNES, France (2) NOVELTIS, France (3) IFREMER, France
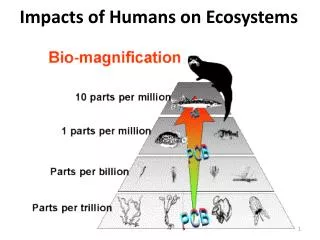
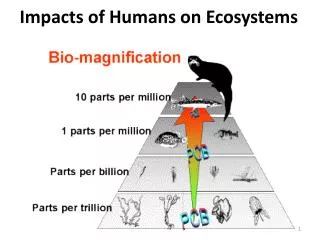
Contents • Introduction • Method of simulation • Simulated clouds : effect on Ka and Ku measurement • Use of MODIS data • Simulation of return waveforms above MODIS tracks • Impacts on range, SWH in several real clouds configurations • Comparison Ka/Ku • Statistical study • Classification of atmospheric attenuation scenes • Results • Conclusion / Perspectives
AltiKa main characteristics Ka-band • Larger bandwidth : higher vertical resolution • negligible ionospheric effect Shorter decorrelation Smaller antenna footprint : better sampling and better behavior in transitions areas (coastal zones …)
AltiKa expected performances • Expected range measurement noise (1 Hz) on ocean surfaces • Accuracy of the altimeter range measurement over sea surface : about 1 cm for a SWH of 2 meters • Improvement of about 40% on the range noise versus Ku-band performances 1 second range noise (cm) versus SWH in Ku- and Ka-bands
Principle of the waveform simulation • Construction of the waveform by application of the radar equation above 100 m x 100 m pixels • Sea conditions : SWH = 2 m • Atmospheric attenuations map • Profile along track • Loop on variable footprints (no temporal correlation) • Retracking : MLE4 • Range, SWH, level, square mispointing ² • With or without Speckle Simulation validation Estimation of the parameters on a “perfect” simulated waveform : Range error : 0.080 cm SWH error : -2.272 cm Mean square mispointing : -2.253016e-004 deg²
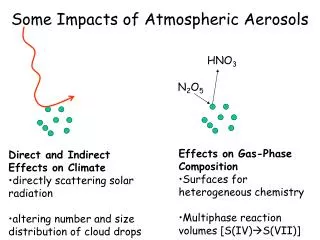
Atmospheric attenuations map • Simulated clouds characterized by • Cloud size (length, width, height Hc) and positioning on the track • Att_dB = 2 Hc kp with kp = LWC. • Ka = 1.070049578 (dB/km)/(g/m3) • Ku = 0.16968466 (dB/km)/(g/m3) • Use of MODIS data (Noveltis and CNES study) • Use of MODIS cloud product (MOD06), around 1 km-pixel • cloud water path (CWP), cloud phase (liquid or ice), cloud optical thickness, cloud particle effective radius are selected for our study • Att_dB = 2 kp x CWP with kp = LWC. • Ka = 1.070049578 (dB/km)/(g/m3) for liquid or ice phase (worst case) • Interpolation of CWP data at 100 m - resolution
Effect of a simulated cloud • Simulated cloud : 5 km diameter, 1 km height, LWC=1g/m3 (1kg/m²) , centered on the track (cumulonimbus characteristics …) Ka-band • 10 cm (max) on range • 40 cm (max) on SWH
Effect of a simulated cloud • Simulated cloud : 5 km diameter, 1 km height, LWC=1g/m3 (1kg/m²), centered on the track (cumulonimbus characteristics …) Ku-band 4 cm (max) on range 20 cm (max) on SWH
Example of MODIS profile : typical weather • Ka-band result :
Example of MODIS profile : typical weather • Comparison of Ka/Ku-band errors for 40-Hz or 20-Hz data on the same profile
Example of MODIS profile : typical weather • Same profile, with additional Speckle noise on the echoes : Range estimations at 40 Hz and 1 Hz, clouds with Speckle • Effect of clouds on the range with Speckle simulation • Average error due to clouds : -0.09 cm • Increase of noise (taking into account a cloud event at the beginning) : from 3.8 cm to 4.1 cm (40 Hz data), from 0.6 cm to 0.95 cm (1 Hz data) • In most cases, presence of cloud cells in footprint induces a low increase of noise w.r.t. Speckle noise
Other example of MODIS profile : high water content event • Evolutions of parameters estimations could be used to discriminate contaminated waveforms • Rain effect, CNES/CLS study on rain rates from TRMM/TMI data shows that : • Average for one year and all geographical areas show that around 3% of data will be unavailable • Unavailability can reach 10% locally depending on season (e.g. Bengal Golf)
Statistical study Method • Extraction of 13km*13km scenes of attenuation from the MODIS “water content” product. • Classification • For each class, simulation of echoes affected by the characteristic attenuation. • Statistical processing
Classification • Neuronal Classification of the attenuation profiles (differential attenuation in the footprint) • Input • 11 724 250 scenes for the classification (12 days :1 day / month) • 3 882 373 scenes for neuronal network training (4 days: 1 day / trimester) • Output • A referent profile of attenuation for each class • Cardinality of the classes • Mean attenuation histogram for each class
Statistical results Ka band and SWH=2m Atmospheric attenuation effect: Range error < 0.1 cm : 85 % , < 1 cm : 93 %, < 2 cm : 96 % SWH error < 1 cm : 88 % , < 5 cm : 95 %
Classification validation : spatial coherence between attenuations and errors • Large scale error cartography
Classification validation : spatial coherence between attenuations and errors • local error cartography
Conclusion • Data unavailability due to clouds has been estimated : • More than 90% of waveforms should be nominally processed • We expect that most of contaminated waveforms could be processed through dedicated algorithms • results in representative situations (along track simulation with Speckle) • Averaging elementary data (e.g. from 40 Hz to 1 Hz) induces a reduction of the errors due to clouds • In typical situations, the effect of clouds is equivalent to an increase of noise measurement • Perspectives : • A general study of waveforms classification is in progress • To build editing method (see Jean TOURNADRE presentation) • Study on geographical and seasonal availability is being performed (with Noveltis)