Mission Overview
Goldeneye University of Minnesota University Nanosat 5 PDR Presentation August 16 th- 17 th , 2007 Logan, Utah. Mission Overview. Mission Statement The purpose of Goldeneye is to design, construct and validate a GPS bistatic radar

Mission Overview
E N D
Presentation Transcript
GoldeneyeUniversity of MinnesotaUniversity Nanosat 5 PDR PresentationAugust 16th-17th, 2007Logan, Utah
Mission Overview Mission Statement The purpose of Goldeneye is to design, construct and validate a GPS bistatic radar for remote sensing applications onboard small satellites in low Earth orbit. Mission Objectives • Obtain Earth reflected GPS signals→ • Obtain direct GPS signals • Process acquired data on the ground Technology Demonstration • Multifunctional applications • Advanced science instrumentation and detector/camera technology • Advanced solutions for miniaturized Nanosat subsystems • Innovative GPS receiver/antenna, hardware, and algorithms
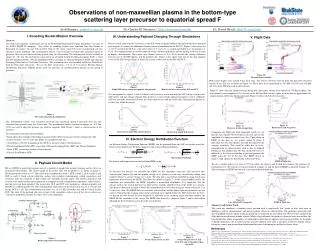
Mission Details: Bistatic Radar • Bistatic Radar : Transmitter is not the receiver as in monostatic radar • Transmitter is the GPS satellite • Receiver is Goldeneye • a is the range between transmitter and receiver • b + ρ is the reflected signal • From the geometry the range, ρ, to the reflection surface can be found By analyzing the reflected signals power, Doppler shift and range variation, information about the reflecting surface can be deduced. The science in this mission is to correlate these reflected signals with known ocean conditions, atmospheric and land conditions thereby exploring this novel application of GPS. Example of Doppler-Shift vs Range Variation from a Reflected GPS Signal. ( S. Gleason, Remote Sensing of Ocean, Ice and Land Surfaces Using Bistatically Scattered GNSS Signals. Ph.D. Thesis. Surrey University. 2006.)
RISK Mission Timeline • Baseline mission: duration - TBD • Startup: • Automatically enabled • Ends when pointing requirements satisfied • Baseline Mode: • Continuously runs after startup • Includes “life support” systems only • Charges batteries • Receives messages from ground station • Sends health status reports to ground station • Attitude Control Mode: • Detumbles Goldeneye • Despins Goldeneye • Points GPS high gain antenna towards Earth • Experiment Mode: • Collects GPS data • Compresses GPS data • Stores GPS data • Transmit Data Mode: • Transmits experiment data to ground station for post processing • Extended Operations
Program Schedule RISK • Purpose: Ensure project is completed on-time • Objective: Meet and verify requirements
Minimum Success: Establish Orbit Acquire direct and reflected GPS signals for at least 36 seconds Transmit GPS data to ground station Post-process GPS data Detect surface conditions on Earth Ocean wind speed Wave/tidal height Nominal Success: Minimum success criteria met Detect additional surface conditions on Earth Ice surfaces Land features Soil moisture content Another Possibility: Collect reflected GPS signals from other objects in orbit Analysis for the possibility of detecting other objects has been done. Radar cross section of reflecting object must meet certain stringent requirements (specular reflector, larger than 30 cm, etc) RISK Mission Top-Level Details: Remote Sensing with GPS
Mission Top-Level Details: GPS Navigation Message Figure adapted from, Misra and Enge Global Positioning System:Signals, Measurements and Perfomrance pp. 104, which is based on a figure by Frankvan Diggelen
Mission Requirements Three systems to accomplish the mission:
RISK System 1 Overview: Goldeneye The purpose of Goldeneye is to validate a GPS bistatic radar for remote sensing applications onboard small satellites in low Earth orbit. Attitude Determination and Control: • Orients Goldeneye to collect experimental data • Determines Goldeneye’s attitude • Detumbles and Despins Goldeneye • Points GPS high gain antenna towards Earth using magnetic torquers with +/- 20 accuracy • Assists magnetic torquers by providing gravity gradient stabilization through Goldeneye’s moments of intertia Data Collection, Storage, and Compression: • Acquires experimental data • Collects raw, Earth-reflected GPS signals for 36 seconds • Collects processed data from direct GPS signals for 36 seconds • Compresses GPS data • Stores GPS data Transmitting to Ground Station: • Allows validation of experimental data • Listens for transmission window and sends stored GPS data to ground station • Validation of the GPS bistatic radar is achieved through processing the GPS data with our own algorithms and correlating the processed data with actual ocean surface conditions
RISK System 1 Design Overview: Goldeneye Goldeneye has 8 subsystems for supporting the bistatic radar mission: Bistatic Radar System (BRS) • direct signal GPS antenna, high gain left-hand polarized GPS antenna, GPS receiver and GPS RF front end collector Attitude Determination and Control System (ADCS) • magnetometer, rate gyro, active magnetic control Navigation System (NAV) • direct signal GPS antenna andGPS receiver Flight Computing System (FCS) • embedded computer, data compression and storage Communications System (COMM) • amateur packet radio system with built-in TNC Power System (PWR) • body-mountedsolar cells, inhibits, UNP-recommended NiCd battery design, DC-DC conversion, mission mode control Structure System (STR) • aluminum isogrid panels, solid aluminum component boxes, electrically conductive coatings, vent holes Thermal Control System (THRM) • Heaters, heat sinks
Design: Bistatic Radar System (BRS) Antenna Configuration
RISK Design: Bistatic Radar System (BRS)
Data: Bistatic Radar System (BRS) • Mission Objective #3: Must be able to transmit data to ground station BRS Data: • 36 seconds of data is 640 Mb (minimum success criteria) • 134.4 Mb after compression • 234 Minutes required to transmit 36 seconds of data to ground
Requirements: Attitude Determination and Control System (ADCS)
RISK Design: Attitude Determination and Control System (ADCS) • Objective: Maneuver from a measured attitude to a desired attitude that will allow Goldeneye to perform the bistatic radar experiment.
Design: Attitude Determination and Control System (ADCS) Attitude Determination: • Blend of magnetometer triad and rate gyro measurements Attitude Control: • Active control through magnetic torquers • Passive control through gravity gradient stabilization (no boom) Control Tasks: • Detumble Goldeneye • Despin Goldeneye • Keep high gain antenna pointed towards Earth with +/- 20 degrees accuracy Dynamic Stability: • Moment of inertia analysis for gravity gradient stabilization • Minimizes control authority required by magnetic torquers
Design: Attitude Determination and Control System (ADCS) Attitude Determination • Legacy design from Nanosat-4 • Attitude determination algorithm has already been validated • Algorithm validated by using post processed space flight sensor data from the NASA/Stanford Gravity Probe B mission. • Subject of the following journal manuscript in preparation: • V. L. Bageshwar, D. Gebre-Egziabher, W. L. Garrard, P. Shestople, and M. Adams, “Inertially Aided Vector Matching Algorithm for Satellite Attitude Determination"
Design: Attitude Determination and Control System (ADCS) Attitude Control • Algorithms for detumbling • Algorithms for despinning • Algorithms for nadir pointing • Moments of inertia for gravity gradient stabilization: • I_roll > I_yaw , Therefore I_xx > I_yy > I_zz • Curtis, Howard D. Orbital Mechanics for Engineers. Elsevier. 2005. Massachusetts. Page 539.
Magnetometer: Goodrich FM02 Measures magnetic field vector of Earth 43 grams 0.33 Watts Acquired Rate Gyro: Honeywell HG1700 Measures angular velocities about x, y, and z axes 726 grams 5.5 Watts 2 deg/hr drift Acquired Magnetic Torquers: TBD Design: Attitude Determination and Control System (ADCS) www.goodrich.com www.honeywell.com
RISK Design: Navigation System (NAV) Antenna: • San Jose Navigation SA-60C • 0.06 Watts • Located on top outer surface of Goldeneye Receiver: • Novatel OEMV-3G • 2 Watts • Housed in a component box www.sanav.com
Design: Navigation System (NAV) • Legacy design from Nanosat-4
Hardware/Software: Arcom PC-104 embedded computer 1.6 Watts 95 grams 400 MHz processor 5 serial ports, RS232 2 USB ports Programming language: C Acquired with Linux, looking for another that supports Windows for the GPS RF front end Interface Software Flash memory 2 Gb required Software data management and test plan Account for all I/O Account for all processes associated with the I/O Computing Budget RISK Design: Flight Computing System (FCS)
2 Radios: Kenwood TH-D7A Nanosat-4 Legacy 380g 54.0 x 119.5 x 43.5 mm 1.65 Watts (receiving) 26 Watts (transmitting) Transceiver Functional Characteristics: Modulation: Reactance Transmitting power: 5 Watts Frequency deviation +/- 5kHz Modem Functional Characteristics: 9.6 kb/s 440 MHz (transmitting)/144 MHz (receiving) Protocols: AX.25 2 Antennas: Omnidirectional, nondeployable, on top of Goldeneye Current height of transmitting antenna causes approx. 14 cm breach of static envelope-considering other options RISK Design: Communications System (COMM) • Shown for one radio. • Second radio is the same.
Solar Cells: EMCORE 607094,192 cells 28% efficient Triple junction GaAs Average power at least 35 Watts Batteries: 14 Sanyo N-4000DRL cells Provided by AFRL DC/DC Power Supply: American power design D150-15/5, 88% efficient, dual regulated outputs: 5V and 15V Power Manager: PIC controller Monitors health of batteries and hardware Activates/Deactivates components based on health data RISK Design: Power System (PWR)
Components and Circuitry Heaters Inhibits Power Switches Voltage Monitors Current Monitors Temperature Monitors Load Status Monitors Transient Protection Overvoltage Protection Overcurrent Protection Short Circuit Protection Telemetry Battery Voltage Bus Voltage Bus Current Component Current Load Status Battery Box Temperature Design: Power System (PWR)
RISK Design: Structure (STR) Aluminum 6061-T6 Panels: • Circular isogrid design • Electrically conductive coating
Aluminum 6060-T6 Component Boxes: Housing for hardware 2-piece design Electrically conductive coating 2 vent holes, 0.25” diameter, size based on results of venting analysis Design: Structure (STR)
Structural Analysis Objective: Gain familiarity with ANSYS Model 1: Confirmation of ANSYS stress deformation results by hand calculation of compressive axial loading of simple rectangular beam. Model 2: Confirmation of ANSYS stress results by hand calculation of a supported plate under acceleration load. Further Analysis: Brackets, component boxes, isogrid panels, solar panels, buckling analysis S1.7 Design: Structure Model 1: Stress at Fixed Base Hand Calculation: s = 706 kPa ANSYS solution: s = 723 kPa
RISK Design: Thermal Control System (THRM) • Heat sinks for components with 1 Watt power consumption • Heaters for temperature sensitive components • Operating Temperatures:
Temperature Sensors Minco S3238PAZT36TB 12.7 X 31.8 X 1.3 mm Heaters Minco HK5160R157L12B 12.7 X 50.8 X 1.3 mm Design: Thermal Control System (THRM) Hardware: www.minco.com
Design: Thermal Control System (THRM) Thermal Analysis • Transient model, 27 orbital scenarios, 1 node, sphere with same surface area asGoldeneye • Worst Case Hot: • Goldeneye Surface: 75.0 degrees C (67.5 degrees avg) • Goldeneye Payload: 75.3 degrees C (71.3 degrees avg) • Altitude: 150 km • Worst Case Cold: • Goldeneye Surface: -11.0 degrees C (-7.5 degrees avg) • Goldeneye Payload: -9.2 degrees C (-7.3 degrees avg) • Altitude: 450 km
RISK System 2 Overview: Ground Station • Communicate, track, and receive data from Goldeneye • Send messages to Goldeneye • Used with amateur packet radio • Located at University of Minnesota
DC Power Supply: TBD Transceiver: TBD Receives signal from Goldeneye Transmits signal from PC TNC (Terminal Node Controller): Kantronics KPC3+ Takes signal from radio and converts to digital signal Sends digital signal to computer PC: Dell Latitude C640 #PP01L Collects and stores data Controls TNC Controls rotator Tracks Goldeneye (NOVA software) 2 Antennas: M2 inc: 2MCP22 (144 MHz) Transmits to Goldeneye M2 inc: 436CP42UG (440 MHz) Receives from Goldeneye RISK Design Overview: Ground Station (GND)
Design Overview: Ground Station (GND) Rotator • Yaesu G5500 with GS-232A Computer interface • Azimuth Range 0 to 360 Degrees • Elevation Range 0 to 90 Degrees • Max Rotation Speed 6 deg/sec (azimuth), 2.5 deg/sec (elevation) • Rotates the antennas to follow Goldeneye
RISK Communication – Link & Licensing RF Link • Signal to noise ratio: -3 dbm • Bit error rate: TBD, based on design and outside interference • Modulation type vs. channel distortion: TBD Licensing • At least level 1 technician • Frequencies: 144/440 MHz (HAM) • Status: Waiting to hear back from FCC about Call sign for Goldeneye, and frequency allocation.
System 3 Overview : Ground Support Equipment (GSE) • Transportation • Lifting mechanism • Long distance travel container • Allow complete operation of Goldeneye pre-launch • Autonomous and remotely controlled mission simulations • Charge, discharge, equalize batteries • Monitor Goldeneye on the ground • Pre-launch data collection through flight computer interface, electrical interface, or radios • Post-launch data collection through radios • Process Goldeneye’s data on the ground • Data management plan • Computer designated for processing data