Download
1 / 31
320 likes | 414 Vues
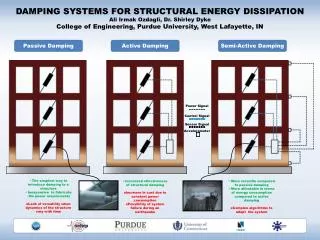
LOCATION AND IDENTIFICATION OF DAMPING PARAMETERS. Contents. Objectives of the research Introduction on damping identification techniques New energy-based method Numerical simulation Experimental results Conclusions Future works. Objectives of the research.

E N D
Contents • Objectives of the research • Introduction on damping identification techniques • New energy-based method • Numerical simulation • Experimental results • Conclusions • Future works
Objectives of the research • - Better understanding of damping in structures from an engineering point of view • Defining a practical identification method • Validate the method with numerical simulations • Test the method on real structures
Damping in structures • Damping in structures can be caused by several factors: • Material damping • Damping in joints • Dissipation in surrounding medium
Issues in damping identification • Absence of a mathematical model for all damping forces • Computational time • Incompleteness of data • Generally small effect on dynamics
Identification techniques • Techniques for identifying the viscous damping matrix • Perturbation method • Inversion of receptance matrix • Lancaster’s formula • Energy-dissipation method Prandina, M., Mottershead, J. E., and Bonisoli, E., An assessment of damping identification methods, Journal of Sound and Vibration (in press), 2009.
Theory • The energy equation can be derived The new method is based on the energy-dissipation method, starting from the equations of motion of a MDOF system
Theory In the case of periodic response, the contribution of conservative forces to the total energy over a full cycle of periodic motion is zero. So if T1 = T(period of the response) And the energy equation can be reduced to
Diagonal viscous damping matrix The simplest case is a system with diagonal viscous damping matrix. In this case the energy equation becomes
Underdetermined system • The energy system of equations is usually underdetermined since the number of DOF can be greater than the number of tests. To solve the problem there are different options: • Change the parameterization of the damping matrix • Increase the number of different excitations • Define a criterion to select the “best” columns of matrix A
Smallest angle criterion Angle between a columnaiof matrix A and the vector e Similarly, an angle between a set of columns B and the vector e can be calculated using SVD an QR algorithm
Numerical example Accelerometers (dof 7, 11 and 19) Dashpots (dof 3, 5, 13 and 17) 10 18 20 4 6 14 16 2 8 12 9 17 19 3 5 13 15 1 7 11
Procedure • Accelerations are measured on DOF 7, 11 and 19 for a set of 8 different excitations at frequencies close to first 8 modes, random noise is added. • Velocities in all DOF are obtained by expanding these 3 measurements using the undamped mode shapes • Best columns ofA are selected using smallest angle criterion • The energy equation is solved using least squares non-negative algorithm (to assure the identified matrix is non-negative definite)
Results Case 1
Results Case 2
Results 0.1 0.1 0.1 0.1 N=1 N=3 N=2 0.107 0.151 0.059 0.212 0.127 0.055
Results Case 2 – Damping factors
Nonlinear identification • The method can be applied to identify any damping in the form In case of viscous damping and Coulomb friction together, for example, the energy equation can be written as
Nonlinear identification New matrix A Viscous Coulomb Friction
Experiment procedure • The structure without magnetic dashpot is excited with a set of 16 different excitations with frequencies close to those of the first 8 modes • The complete set of accelerations is measured and an energy-equivalent viscous damping matrix is identified as the offset structural damping • The measurement is repeated with the magnetic dashpot attached with the purpose of locating and identifying it
Experiment procedure • Velocities are derived from accelerometer signals • Matrix A and vector e are calculated, the energy dissipated by the offset damping is subtracted from the total energy • The energy equation (In this case overdetermined, since there are 16 excitations and 10 DOFs) is solved using least square technique
Experimental results • Magnetic viscous dashpot on DOF 9
Further experiments • Further experiments currently running will include more magnetic dashpots in different DOFs. • They will also include nonlinear sources of damping such as Coulomb friction devices.
Advantages of the new method • Estimation of mass and stiffness matrices is not required if a complete set of measurements is available • Can identify non-viscous damping in the form • Robustness against noise and modal incompleteness • Spatial incompleteness can be overcome using expansion techniques
Conclusions • New energy-based method has been proposed • Numerical simulation has validated the theory • Initial experiments on real structure give reasonably good results, further experiments are currently running
Future works • Coulomb friction experiment • Extend the method to include material damping • Try different parameterizations of the damping matrices
Acknowledgements • Prof John E Mottershead • Prof Ken Badcock • Dr Simon James • Marie Curie Actions