Force-Directed Methods
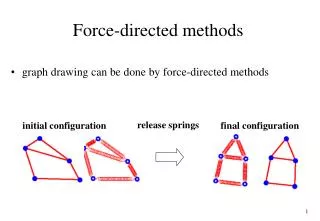
Force-Directed Methods. — Drawing Undirected Graphs. Force-Directed Methods. Use a physical analogy to draw graphs How does the natural “draw” a graph? View a graph as a system of objects with forces acting between them. Assumption: a balanced system gives a good layout

Force-Directed Methods
E N D
Presentation Transcript
Force-Directed Methods — Drawing Undirected Graphs
Force-Directed Methods • Use a physical analogy to draw graphs • How does the natural “draw” a graph? • View a graph as a system of objects with forces acting between them. • Assumption: a balanced system gives a good layout • Specifically, a system configuration with locally minimal energy: • The sum of the forces on each object is zero.
Force-Directed Methods • Vertex: • Object of the system; • Interacting with each other based on “some” force(s). • Edge: • A different type of object; • Not interacting with each other; • Add new force(s) to vertex object. • Equilibrium configuration: the sum of forces on each vertex object is zero
There are many force directed methods. In general, they have two parts: model & algorithm • The model: a force system defined by vertices & edges • The algorithm: a technique for finding an equilibrium state, that is the sum of the forces on each vertex is zero (force system);or • a technique for finding a configuration with locally minimal energy (energy system)
Spring Methods • Vertex: • Electrically charged particles; • Repel each other. • Edge: • Spring that connect particles; • Attraction force when longer than the natural length; • Repulsion force when shorter than the natural length. 1. 2.
A Larger Example © Sander
Many Variations • Spring & electrical force • Barycenter method • Force simulating graph theoretic distance • Magnetic field • General energy function • Constraints
(u,v) (u,v) VxV E 1. Springs & Electrical Forces • Use a combination of spring & electrical forces • Edge: modeled as spring • Vertex: equally charged particles which repel each other • The force on v : F(v) = Σ f u,v + Σ g u,v • f u,v: force on v by the spring between u an v : follow Hook’s law (proportional to the difference between the distance between u and v and the zero-energy length of the spring) • g u,v : Electrical repulsion exerted on v by vertex u : follow inverse square law
d(p,q) : Euclidean distance between points p and q • pv = (xv, yv): position of vertex v • x component of the force on v lu,v: natural (zero energy) length of the spring between u and v : if the spring has natural length lu,v, no force is exerted; k1u,v : stiffness of the spring between u and v : the larger k1u,v, the more tendency for the distance between u and v to be close to lu,v. k2u,v : the strength of the electrical repulsion between u and v
Aim of the force model design: • Spring force: • Ensure the distance between adjacent vertices u and v is approximately equal to lu,v. • Electrical force: • Ensure vertices not too close to each other. • One may choose parameters luvk1u,v k2u,v to customize for specific applications.
There are many technique to find an equilibrium configuration (or minimum energy). • Simple algorithm • Initially at random location • At each iteration: • Force F(v) on each vertex is computed • Each vertex v is moved in the direction of F(v) by a small amount proportional to the magnitude of F(v) • Stops when equilibrium is achieved or some conditions are met. • Not the fastest, but allow smooth animation. • Calculating attractive forces only between neighbors: O(|E|) • Calculating repulsive forces between all pair of vertices: O(|V|2) • Bottleneck of the algorithm in general
Spring Embedder [Eades84] “Logarithmic spring” • Rather than Hook’s law, the spring force is calculated as: • Hook Law (linear) spring is too strong when the vertices are far
Advantages • Relatively simple & easy to implement • Good flexibility • Heuristic improvements easily added • Handle domain constraints • Smooth evolution of the drawing into the final configuration helps preserving the user’s mental map • Can be extended to 3D • Often able to display symmetries • Works well in practice for small graphs with regular structure • Show some clustering structure
Disadvantages • Slow running time • Results are acceptable, but not brilliant • Few theoretical results on the quality of the drawings produced • Difficult to extend to orthogonal & polyline drawings • Limited constraint satisfaction capability
2. Barycenter Method [Tutte60,63] • Use springs with natural length 0, and attractive force proportional to the length • Pin down the vertices of the external face to form a given convex polygon (position constraint) • Let the system go…
luv = 0, k1u,v = 1, no electrical force • Trivial solution pv = 0 for all v
Partition V into two sets: fixed vertex (at least 3, nailed down) and free vertex • To achieve equilibrium, choose pvso that Fx(v) = 0 for all free vertices; • Similarly, choose pvso that Fy(v) = 0 for all free vertices. Therefore, • Where deg(v) is the degree of v, • N0(v): set of fixed neighbor of v; • N1(v): set of free neighbor of v.
The equations are linear. • The number of equations and the number of unknownvariables are both equal to the number of free vertices. • Solving them equals to placing each free vertex at the barycenter of its neighbours. • So the name ‘barycenter method’.
(u,v) (u,v) E E Algorithm Barycenter-Draw Input: partition of V, V0: at least 3 fixed vertices V1: set of free vertices Strictly convex polygon P with V0 vertices Output: position pv 1. Place each vertex u in V0 at a vertex of P and each free vertex at the origin 2. Repeat For each free vertex v do xv = 1 Sxu deg(v) yv = 1 Syu deg(v) Until xvand yv converge for all free vertices v _____ _____
3. Force Simulating Graph Theoretic Distance [Kamada Kawai 89] • Model graph-theoretic distance with Euclidean distance • The forces try to place vertices so that their geometric distance in the drawing is proportional to their graph theoretic distance • For each pair of vertices (u, v), δ(u,v) is the graph-theoretic distance between them; • Number of edges on a shortest path between u and v. • Aim: find a drawing such that for each pair of vertices, the Euclidean distance d(pu, pv) is approximately proportional to δ(u,v) • i.e. system has a force proportional to d(pu, pv)- d(u,v)
E u v • Potential energy in the spring between u and v: ½ kuv (d(pu, pv) - d(u,v))2 • Choose stiffness parameter: springs between vertices that have small graph theoretic distance are stronger kuv = k / d(u,v)2 • Thus, energy in (u, v): h = k/2 (d(pu, pv)/d(u,v) – 1)2 • Energy in the whole drawing is the sum of individual energies: h = k/2 S (d(pu, pv)/d(u,v) – 1)2 • Algorithm seek a position pv=(xv, yv), for each vertex v to minimize h • h / xv = 0, h / yv = 0, v V : non linear equation • Partial derivatives with respect to each xv and yv are zero
However, iterative approach can solve the equation • At each step, a vertex is moved to a position that minimizes energy, while other vertices remain fixed • Choose a vertex that has the largest force acting on it, that is is maximized for all v in V.
4. Magnetic Fields [SM95] • Variations: • Some or all of the springs are magnetized • There is a global magnetic field that acts on the spring • Magnetic field can be used to control the orientation of edges • 3 types of magnetic fields • Parallel: all magnetic forces operate in the same direction • Concentric: the force operates in concentric circles • Radial: the forces operate radially outward from a point
The three basic magnetic fields can be combined • encourage orthogonal edges with a combination of parallel forces in the horizontal & vertical directions • The springs can be magnetized in two ways: • Unidirectional: the spring tends to align with direction of the magnetic field • Bidirectional: the spring tends to align with the magnetic field, but in either direction • A spring may not be magnetized at all
Unidirectional magnetic spring θ Direction of the magnetic field • The magnetic field induces a torsion or rotational force on the magnetic springs. • For a unidirectionally magnetized spring representing (u,v), the force is proportional to d(pu, pv)aq b d(pu, pv): Euclidean distance between puandpv • q: angle between the magnetic field and the line from putopv • a and b are constant
The magnetic forces are combined with the spring & electrical force • Algorithm to find equilibrium: • initially random position and at each iteration move the vertex to lower energy position • Can handle directed graphs (unidirectional springs with one of the 3 fields) • arcs point downward: downward parallel field • Outward: radial field • Counterclockwise: concentric field • Can be applied to orthogonal drawings: combined vertical & horizontal field with bidirectional springs • Applied with success to mixed graphs (graph with both directed & undirected edges)
Two Examples Vertical and horizontal magnetic field Vertical magnetic field
5. General Energy Function • Most of the energy function h is a simple continuous function of the location of vertices. However, many of aesthetic criteria are not continuous • Including discrete energy function • The number of edge crossings • The number of horizontal & vertical edges • The number of bends in edges • general energy function h = l1 h1 + l2 h2 + … + lk hk • hi : a measure for an aesthetic criterion • May include spring, electrical, magnetic energy
[Davidson & Harel 96] energy function for straight line drawings • = l1 h1 + l2 h2 + l3 h3 + l4 h4 h1= Su,v V (1/ (d(pu, pv))2 ) : similar to electrical repulsion (vertices do not come too close together) ru, lu, tu, bu: Euclidean distance between vertex u and the four side lines of rectangular area (vertices do not come too close to the border of the screen) h3= S(u,v) E (d(pu, pv))2 : edges do not become too long h4 : the number of edge crossings in the drawing
Flexibility of general energy function: allow variety of aesthetics by adjusting li • [BBS97]: user can choose & adjust system parameters • [Mendonca94]: how these coefficients can be automatically adjusted to user’s preference • Main problem: computationally expensive to find a minimum energy state (very slow) • simulated annealing [DH96]….. • Genetic algorithm [BBS97]… • Flexibility ensures popularity
[Davidson & Harel 96] simulated annealing • Energy function takes into account vertex distribution, edge-lengths, and edge-crossings • Given drawing region acts as wall • Simulated annealing: flexible optimization technique • Efficiency: very slow • 30 nodes and 50 edges • Able to deal with optimization problem in a discrete configuration space • Aim: to minimize (or maximize) the cost function
6. Constraints • Force-directed methods can be extended to support several types of constraints 6.1. Position constraints 6.2. Fixed-subgraph constraints 6.3. Constraints that can be expressed by force or energy function
assign to a vertex a topologically connected region where the vertex should remain Single point: a vertex nail down at a specific location Horizontal line: group of vertices arranged on a layer A circle: set of vertices to be restricted to a distinct region [Ostry96]: constraints vertices to curves and 3D surfaces 6.1. Position constraints
6.2. Fixed subgraph constraints • Assign prescribed drawing to a subgraph . • May be translated or rotated, but not deformed. • Considering the subgraph as a rigid body. • For example, barycenter method is a force-directed method that constrains a set of vertices (fixed external vertices) to a polygon.
6.3. Constraints expressed by forces • Constraints expressed by forces • Orientation of directed edges: magnetic spring • Geometric clustering of special set of vertices • Alignment of vertices • Clustering can be achieved [ECH97] • For each set C of vertices, add a dummy attractor vertex vC • Add attractive forces between an attractor vC and each vertex in C. • Add repulsive forces between pairs of attractors and between attractors and vertices not in any cluster.
Remark • Improve the efficiency • [FR91]: amenable force functions • [FLM95, Tun92]: use randomization in S.A. • [Ost96]: the equations describing the minimal energy states are stiff for some graphs of low connectivity. • [HS95]: use combinatorial preprocessing step, good initial layout • [BHR96] empirical analysis • [FR91],[KK89],[DH96],[Tun92],[FLM95] • No winner, try several methods and then choose the best
Faster Spring methods • Problem: Spring methods are too slow for huge graphs 1.pu = some initial position for each node u; 2. Repeat • 2.1Fu := 0 for each node u; • 2.2For each pair u,v of nodes 2.2.1 calculate the force fuv between u and v; 2.2.2Fu += fuv; 2.2.3Fv += fuv; • 2.3For each node u, pu += eFu; Untilpu converges for all u; Computing the forces takes quadratic time
Clustered Graph Graph FADE [Quigley & Eades01] • It is feasible to use • a spring method, then • a geometric clustering method to obtain a good graph clustering.
A tree data structure Each internal node has up to four children. Most often used to partition a two dimensional Recursively subdividing it into four quadrants or regions. Stops when each quadrant contains one point. In general, recursively partition the space into 2d subspace equally, where d is the dimension Known as Octree for 3D Quadtree
c BR TL a b d BL e f Barnes-Hutt method • A method of computing forces between stars. • Use Quadtree to cluster the stars • Use the forces between the clusters to approximate the forces between individual stars. root a b d c e f
s c BR TL a b d BL s e f Barnes-Hutt method • The contents of a subtree of can be approximated by a mass at the centroid. root a b d c e f
c s BR TL a b d BL s e f Barnes-Hutt method • The force that the subtree s exerts on the star x can approximate the sum of the forces that the nodes in s exert on x. root a b d c e f
FADE To compute the force on star x, we proceed from the root toward the leaves. ComputeForce(star x; treenode t) If the approximation is good then return the approximation; else return SsComputeForce(x, s), where the sum is over all children s of t. A simple method can be used to determine whether the approximation is good; it depends on the mass of nodes and the distance between x and s. w(t) / d(x,t) < c, w(t) the width of t; d(x,t) the distance between x and t, and c is a constant.
FADE • The Barnes-Hutt method is faster than the usual spring algorithm. 1.px = some initial position for each star x; 2. Repeat 2.1 Build the quadtree; 2.2Foreach star x ComputeForce(x,root); 2.3Foreach star x, px += eFx; Untilpx converges for all x; In practice, computing all the forces takes O(n log n) time
FADE • At each iteration, the node movements introduced in the previous step improves the quadtree clustering • Makes the quadtre clustering (a geometric clustering) better reflects the graph clustering. 1.pu = some initial position for each node u; 2. Repeat 2.1 Build the quadtree; 2.2Foreach node u ComputeForce(u,root); 2.3Foreach node u, pu += eFu; Untilpu converges for all u; Some nodes migrate from one cluster to the next
FADE • Observations • The Quadtree provides a clustering of the data • If the data is well clustered, then BH runs faster • The approximated force is then more accurate • The spring algorithm tends to cluster the data • This means that we can: • Use Barnes-Hutt to compute the clusters as well as the drawing • Use the quadtree as the clustering for the clustered graph
Experimental Result The error is the difference between the approximated force vector and the original one Visual abstraction