Download
1 / 70
1.21k likes | 2.38k Vues
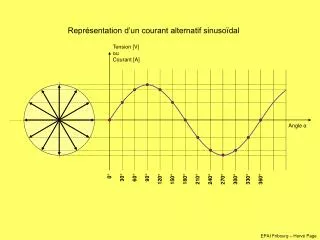
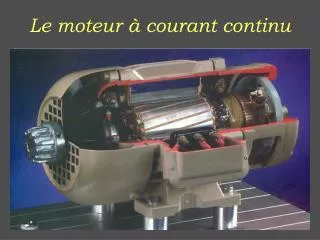
La variation de vitesse des moteurs à courant continu. sommaire. Technologie des moteurs Variation de vitesse freinage des moteurs Les aimants permanents. Technologie des moteurs. rotor. Auxiliaires de commutation 1B1, 1B2, 2B1, 2B2. Bobinage Induit A1-A2. Porte balai.

E N D
sommaire • Technologie des moteurs • Variation de vitesse • freinage des moteurs • Les aimants permanents
Technologie des moteurs rotor Auxiliaires de commutation 1B1, 1B2, 2B1, 2B2 Bobinage Induit A1-A2 Porte balai Inducteur F1-F2 Compensation C1-C2 Stabilisation D1-D2 collecteur stator Vue générale refroidissement
Stator On peut retenir 3 parties : - fixation du moteur (bride ou support de fixation) - la boite à bornes (câblage) - la culasse Voir catalogues constructeurs La culasse forme la partie extérieure. Sa fonction : - Supporter tous les éléments constitutifs d ’une MCC - Guider les lignes du champ inducteur. Elle peut être constituée d ’acier massif car le flux est fixe retour
Inducteur Il magnétise la machine par l ’intermédiaire d’un champ fixe constant ou réglable. 2 solutions sont possibles pour cela : - bobine + pièce polaire (page suivante) - aimant permanent (un chapitre lui est consacré)
Inducteur Le bobinage est réalisé en fil de cuivre de section plus faible que celui de l’induit (excitation indépendante) L’inducteur peut être massif, mais le passage de la denture de l’induit provoque une pulsation de flux dans la partie des épanouissements polaires. Pour cette raison on réalise les pôles inducteurs en un assemblage de tôles magnétiques (acier à 3,5% de silicium). Avec cette solution on peut régler la vitesse retour
le circuit magnétique le collecteur le circuit électrique Rotor ou induit Il est constitué de 3 parties
Rotor ou induit Le circuit magnétique On peut retenir : - tôles isolées à 3,5% de silicium, épaisseur 0,35 mm - des pertes de 3 W/kg pour une induction de 1T Le flux dans le CM est variable. Pour diminuer les pertes par hystérésis et courants de Foucault le CM est feuilleté
Têtes de bobinage (chignons) Rotor ou induit Le circuit électrique (terminologie) 1 section c’est : = 2 faisceaux = x spires 1 faisceau = x brins Lame du collecteur Représentation d ’une section Les sections sont montées dans les encoches de l ’induit
y1 y2 y2 y1 yc Bobinage imbriqué yc Bobinage ondulé Rotor ou induit On rencontre 2 sortes de bobinage Représentation panoramique Le choix des bobinages dépendra des courants et tensions appliquées à l ’induit. bobinage imbriqué : forte intensité, faible tension bobinage ondulé : faible intensité, forte tension Yc = pas au collecteur ; y1 = pas de bobine ou pas arrière ; y2 = pas avant retour
Départ d ’une section Retour d ’une section Lame de cuivre Couronne de positionnement Arbre rotor isolant Écrou de serrage retour Rotor ou induit Collecteur C’est l’élément qui limite le plus les performances du moteur
Balais et porte-balais L’usure du balai provoque la mise en court-circuit du collecteur (flash). Nécessité de souffler, avec de l ’air comprimé, le collecteur et les porte-balais Un balai couvre environ la largeur de 1 lame et demi. La pression du balai est assurée par un ressort. La matière utilisée pour les balais est à base de graphite. La chute de tension eB due à un balai est d’environ 0,3V à 3V.
Sélection des balais * Charbon dur (8A/cm2). Pour appareil ménager et moteur universel en général. Usure importante du collecteur. * Charbon électrographite (12A/cm2). Les performances sont excellentes pour les applications les plus diverses. * Charbon graphite (12A/cm2). Adapté aux petits moteurs à courant continu, pour l'automobile par exemple. Par mélange de graphite et de métal, fritté ensemble, on obtient une meilleure conductivité électrique et un effet lubrifiant. * Charbon graphite - cuivre (25A/cm2). Ce type de balai est bien adapté aux faibles tensions et la résistance à l'usure est grande. * Charbon graphite - argent (2OA/cm2). la chute de tension aux bornes est très faible. Bien adapté pour les tachys et les instruments de mesure. Le choix des balais est encore aujourd'hui une affaire d'expérience. Il est donc vivement conseillé de suivre les indications du constructeur en cas de remplacement de balais. retour
S N W S N réaction magnétique d ’induit RMI Ligne neutre 1er : moteur à vide seul l’inducteur est alimenté. On a un champ uniforme. 3ème : fonctionnement moteur. On a composition des 2 champs. Conséquence : - rotation de la ligne de neutre - renforcement des lignes de champs sous les cornes polaires d ’entrée - réduction des lignes de champs sous les cornes polaires de sortie 2ème : induit seul alimenté. On a un champ transversal au champ inducteur. Ce champ est de plus faible intensité. C ’est lui qui crée la réaction magnétique d ’induit.
Correction de la RMI En fonctionnement moteur la RMI entraîne une diminution du flux inducteur donc une augmentation de la vitesse Par des pôles de compensation sur des machines de puissance supérieure à 150 kW Par des enroulements de stabilisation sur des machines de puissance supérieure à 10 kW Par des pôles de commutation sur des machines de puissance supérieure à 1 kW Ces valeurs de puissance sont indicatives car elles varient d’un constructeur à l’autre suivant les dispositions technologiques adoptées
Pôles de compensation Ils sont placés dans les épanouissements polaires et sont connectés en série avec l’induit. Ils produisent un flux inverse de la RMI. Uniquement pour les inducteurs bobinés retour
Enroulement de stabilisation F stabilisation Enroulement inducteur F inducteur Enroulement de stabilisation Il est connecté en série avec l’induit de façon à produire un flux additif ( sur l ’inducteur). Il limite les effets de la RMI. retour
Pôles auxiliaires de commutation Ils limitent la production d’étincelles entre le collecteur et les balais par annulation du courant dans la section où le courant s ’inverse Ils sont câblés en série avec l’induit et se trouvent perpendiculaires à l ’axe de l ’inducteur Pour des machines de petite puissance (1 à 10 kW), on utilise cet enroulement pour faire la compensation de la réaction magnétique d ’induit (RMI) retour
Rôle des différents bobinages : excitation 1 : auxiliaire de commutation 2 : compensation 3 : série stabilisation 4 : réaction d ’induit retour
Inducteur elles peuvent être plus importantes que dans l’induit. Induit Refroidissement Les principales sources de chaleur . Elles sont essentiellement dues aux pertes par effet joule dans les conducteurs électriques Dans le cas d’un inducteur à aimant il n’y pas de pertes à ce niveau.
L ’évacuation des sources de chaleur se fait par 3 modes de transfert convection * naturelle * forcée conduction rayonnement
on fixe un ventilateur qui fonctionne indépendamment de la Mcc. La circulation d’air dans l’entrefer est ainsi forcée. Excepté : robotique, équipement automobile, petite puissance. sommaire Refroidissement Du point de vue industriel lorsqu’on installe une Mcc, c’est pour l’utiliser associée à un variateur
Variation de vitesse Modèle équivalent On ne s’intéressera qu’à l’étude des Mcc à excitation indépendante à flux constant en application moteur. « Charge entraînante ou non. » R : résistance du bobinage de l’induit L : inductance du bobinage de l’induit E : fcem dans l ’induit due au mouvement de rotation du rotor (champ inducteur coupé par les sections de l’induit)
Rappel des expressions U = RI + eB + L dI/dt + E E = K x W x F C = K x I x F Dans notre cas E et I peuvent se ramener aux expressions suivantes : E = K’ . W C = K’ . I Avec K constante de machine K = 2 . . Z . p / a Z = nombre de conducteurs dans une encoche p = nombre de paires de pôles a = nombre de paires de voies W = vitesse de rotation en rad/s F = flux inducteur en Wb I = courant d’induit en A eB = chute de tension aux balais (négligée)
Simplification des expressions Dans un premier temps on considère que : - La chute de tension aux bornes de la résistance reste faible. - Le courant est suffisamment lissé pour que LdI/ dt = 0. On obtient les expressions suivantes : U K’W I C / K’ Si on modifie U alors on modifie W. Si le couple (charge) varie alors le courant varie. Pour faire varier la vitesse il suffit de faire varier la tension moyenne appliquée sur le moteur
en charge W C1 C2 C3 W U3 à vide U2 U1 U C Courbes paramétrées en C Courbes paramétrées en U Mcc = Source d ’énergie Variation de Umoy charge W Caractéristiques mécaniques Caractéristiques à flux constant synoptique d ’un moto variateur (en B.O.)
W (U) générateur moteur C (I) moteur générateur récepteur P > 0 générateur P < 0 Les grandeurs U et I sont positives ou négatives ; donc les grandeurs mécaniques sont positives ou négatives. Cela définit les quadrants de fonctionnement mécanique et électrique. 2 1 3 4 C’est la puissance P = C . W qui définit la nature du fonctionnement.
Structures des variateurs Plusieurs critères sont à prendre en compte : - nature de la source d ’énergie (continue ou alternative) ; - 1 ou 2 sens de rotation ; - charge entraînante ou non ; - freinage naturel ou forcé ; - puissance du moteur ; - le moteur fonctionne en couple ou en vitesse ; - etc.... La structure interne des variateurs est liées à ces critères. On se limitera à la prise en compte des 4 premiers critères.
Mcc = Réseau électrique charge W = Alimentation par le réseau Le variateur est un redresseur commandé : - soit avec un pont mixte ; - soit avec un pont complet.
W W 2 1 C 1 C 3 4 Alimentation par le réseau monophasé P < 10 kW Pont PD2 mixte Double pont PD2 complet 0,65 ….. 9,3 kW 0,6 ….. 8,6 kW Source Schneider Électrique gamme Rectivar
W W 2 1 C 1 C 3 4 Alimentation par le réseau triphasé P > 3 kW Double pont PD3 complet Pont PD3 complet 6 ….. 1690 kW 2,7 ….. 1530 kW Source Schneider Électrique gamme Rectivar
Th1 Th2 Réseau DRL M = D1 D2 avec un pont mixte Schéma de principe • Les I.S. sont unidirectionnels en courant (non réversible en couple). • Un seul sens de rotation. • 1 quadrant de fonctionnement (N°1). • Aucune contrainte de freinage.
Th1 Th2 Réseau DRL M = D1 D2 Si on veut un 2ème sens de rotation moteur Il faut croiser les connexions sur le moteur (inversion de polarité) à l’aide d’un contacteur • 2 quadrants de fonctionnement (N°1 et 3). • Les conclusions précédentes restent identiques
Th1 D1 Réseau M = Th2 D2 Industriellement on utilise plutôt la structure suivante. Ce bloc assure la fonction DRL Les zones ombrées représentent des blocs intégrés.
Th1 Th2 Réseau M = Th4 Th3 avec un pont complet Schéma de principe • Les I.S. sont unidirectionnels en courant (non réversible en couple). • 2 sens de rotation. • 2 quadrants de fonctionnement (N°1 et 2). • Freinage statique (quadrant N°2).
Th1 Th2 Réseau M = Th 4 Th3 Si on veut un 2ème sens de rotation moteur 1ère solution • Les I.S. sont unidirectionnels en courant • 2 sens de rotation. • 4 quadrants de fonctionnement. • Freinage statique (quadrant N°2 et 4). Il faut croiser les connexions sur le moteur (inversion de polarité) à l ’aide d’un contacteur. Solution peu retenue industriellement. Elle ne permet pas un freinage dynamique
Th1 Th2 Th1 Th2 Réseau M = Réseau Th4 Th3 Th4 Th3 Il faut gérer le passage de la conduction d’un pont sur l’autre (passage Q2 Q3 et Q1 Q4) 2ème solution • Les I.S. sont unidirectionnels en courant • 2 sens de rotation. • 4 quadrants de fonctionnement. • Freinage statique et dynamique (quadrant N°2 et 4).
Industriellement le pont complet n’est utilisé que dans le cas où la récupération d’énergie est possible (levage, traction,….). De plus le facteur de puissance d’un pont mixte est supérieur à celui d’un pont complet. Le dimensionnement des constituants sera mieux optimisé.
= Mcc = Réseau continu charge W = Alimentation continue Le variateur est un hacheur de type série. Le réseau continu provient : - soit de batteries - soit d’un redresseur à diode
t1 T 1 0 Signal de commande HACHEUR t1 T 1 0 IM Etat logique du hacheur UM M = E t1 T E UM DRL Tension moteur commande IM DI Courant moteur Principe du hacheur Composant de base du hacheur : - transistor bipolaire, - transistor MOS, - transistor IGBT, - thyristor. Le choix dépend essentiellement de la puissance, de la date de création.
Moteur P > 0 Générateur P < 0 1 W 4 C Quadrant de fonctionnement Avec ce type de hacheur on peut travailler dans un quadrant (1) ou 2 quadrants (1 et 4) suivant la réversibilité en courant de l’interrupteur statique et de la source.
T1 T2 IM M = E T3 T4 UM 2 sens de rotation On peut utiliser un contacteur comme dans la solution “ redresseur ”. On préfère une structure “ pont en H ” qui nous permet de fonctionner dans les 4 quadrants. Il faut réaliser une inversion de polarité sur les bornes de l’induit. On aura le fonctionnement dans les quadrants 1 et 3.
moteur générateur 2 1 W 4 3 C générateur moteur Quadrant de fonctionnement Pour travailler dans les 4 quadrants il est nécessaire que les I.S. et que la source soient réversibles en courant. sommaire
Dans le cas où il est nécessaire de ralentir la charge il y a plusieurs solutions pour dissiper l’énergie cinétique emmagasinée par le rotor et la charge : • - Freinage mécanique (non abordé dans ce chapitre) • Utilisation d’un module de freinage (résistance électrique) dans lequel vient débiter la Mcc. • Renvoi de l’énergie dans la source.
moteur générateur 2 1 W 4 3 C générateur moteur Point de fonctionnement Passage du quadrant 1 vers 2 sur une variation de couple brutale (la vitesse ne peut pas varier instantanément.) 2 cas peuvent se présenter Passage du quadrant 1 vers 4 lors d’une inversion de vitesse. (Le couple ne peut pas varier instantanément)
Th1 Th2 Module de freinage Réseau M = DRL D1 D2 Redresseur commandé avec un pont mixte Aucune possibilité de freinage par le variateur rajout d ’un module de freinage
Th1 Module de freinage Th2 Réseau M = Th4 Th3 Redresseur commandé avec un pont complet Ce convertisseur nous permet de travailler dans les quadrants 1 et 2. Il est donc possible d’avoir un freinage par inversion de la tension (renvoi de l’énergie sur le réseau). Par contre la réversibilité en courant n’est pas possible. Une solution consiste à rajouter un module de freinage. On a alors un freinage possible dans les quadrants 2 et 4.
HACHEUR IM DRL E M UM commande Hacheur avec un interrupteur statique Le freinage peut se faire sans modification de la structure si l’interrupteur statique et la source sont réversibles en courant. Il faut alors surveiller la tension aux bornes de la source afin qu’elle ne devienne pas trop importante (tenue des composants en tension). Dans le cas d’une impossibilité de la réversibilité de la source on rajoute un module de freinage
Hacheur avec un pont en H • Le freinage peut se faire sans modification de la structure à condition que : • les interrupteurs statiques soient réversibles en courant. • La source d’alimentation soit réversible en courant. • Dans le cas d’une non réversibilité de la source, ce qui est souvent le cas du point vue industriel, et que par ailleurs on désire un freinage rapide, il faut rajouter un module de freinage aux bornes de la source.