Download
1 / 20
200 likes | 457 Vues
A Human-centered Semantic Navigation System for Indoor Environments. V. Tsetsos, C. Anagnostopoulos, P. Kikiras, T. Hasiotis and S. Hadjiefthymiades. Pervasive Computing Research Group, Communication Networks Laboratory (CNL), Dept. of Informatics & Telecommunications,

E N D
A Human-centered Semantic Navigation System for Indoor Environments V. Tsetsos, C. Anagnostopoulos, P. Kikiras, T. Hasiotis and S. Hadjiefthymiades Pervasive Computing Research Group, Communication Networks Laboratory (CNL), Dept. of Informatics & Telecommunications, University of Athens International Conference on Pervasive Services (ICPS’05) July 11-14 2005 Santorini, Greece
Presentation Structure • Introduction • System Design • Conclusions
Pedestrian Navigation Systems • Navigation = a typical Location Based Service • Indoor vs. Outdoor • Outdoor Navigation has attracted more interest, partly due to GPS proliferation • Indoor Navigation research is driven by robot navigation • Pedestrian Indoor Navigation • Museum guides • Special solutions for people with disabilities • Semantic LBS: A new human-centered approach • Intelligent service provision based on ontological knowledge representation and hybrid location modeling • Human-centered services, suitable for people with disabilities • Can be deployed in “smart environments”
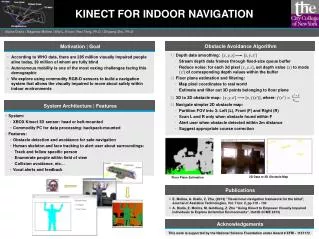
Motivation • Complex and unknown built environments cannot be easily explored • People with disabilities face additional difficulties and put extra effort when following paths that eventually become non-traversable • Built environments are associated with rich semantics which may lead to intelligent services if appropriately exploited • OntoNav’s goal: to assist the path selection and E2E user guidance by exploiting the semantics of indoor spaces
Use Case (I) Destination 5 “walkable” paths
Use Case (II) Destination 2 traversable paths Best Traversable Path is not the shortest “walkable” path
Presentation Structure • Introduction • System Design • Conclusions
Indoor Positioning System Spatial DB GEO NAV Ontology Repository SEM User Profiles OntoNav Architecture • Navigation Service (NAV) • Geometric Path Computation Service (GEO) • Semantic Path Selection Service (SEM)
System Functionality (I) User-compatible graph Building graph Building blueprints (GIS) Data Migration Spatial DB INO instances User-compatible INO instances Indoor Navigation Ontology (INO) User profile (capabilities)
System Functionality (II) User-compatible graph User profile SEM NAV GEO k shortest paths Best Traversable Path User-compatible INO instances User and destination locations
Indoor Navigation Ontology (INO) I • Represents complex built environments from a navigation perspective • Imports concepts from indoor location ontology • Building, Floor, Room, Corridor, … • no well-established indoor location ontology exists merging and extensions of existing indoor location models are pursued • INO is currently in evaluation phase
User profiles • Describe the capabilities and preferences of users • A user profile (UP) contains: • Physical navigation rules (e.g., wheelchair) • Perceptual navigation rules (e.g., child, illiterate) • Routing preferences (e.g., calendar-based) • A user typically selects a predefined UP and further adjusts it • UPs are implemented as sets of rules that refer to INO vocabulary and are applied to INO instances • e.g., if userx cannot walk and pathp contains a vertical passage v of type “stairs” then p is excluded
NAV Service • Provides the interface between end-users and OntoNav • Receives user requests • Retrieves user position and location of destination • Handles path presentation issues
GEO Service • Inputs • a planar graph that accumulates the floor sub-graphs that are traversable by a specific user • user and destination locations • Output • k shortest paths • Edges=corridor segments, vertices=exits and passages (i.e., each location is reduced to a set of exits or passages) • Performs hierarchical clustering in the graph on a floor basis for more efficient path discovery • We cannot promote only the shortest path as it may not satisfy all user preferences
SEM Service • Inputs • user profile • k shortest paths • Output • “best” traversable path (BTP) and its anchors • BTP is the path that: • satisfies the routing preferences of the user profile • contains adequate number of “appropriate” anchors (landmarks) for its presentation • An anchor is “appropriate” if it satisfies the physical andperceptual navigation rules of the user • Example: for a blind or illiterate user the BTP should contain voice-enabled anchors
Implementation Issues • OntoNav is currently being developed using: • Web Ontology Language (OWL-DL) - navigation ontology • Semantic Web Rules Language (SWRL) - user profiles • SweetRules v2.1 - SWRL rules engine • Racer, Pellet – OWL reasoning engines • PostGIS – spatial database • JUNG – Java graph library
Presentation Structure • Introduction • System Design • Conclusions
Added Value of OntoNav • A purely user-centric navigation system, that adheres to the Inclusive Design paradigm • Hybrid location model (geographic and symbolic) that: • Enables more advanced interpretations of distance than the Euclidean one • Introduces user-defined quality metrics to the path selection process • Suitable for “intelligent context-aware environments”
Future Work • Inference of user status for assistance during the navigation process • e.g., identification of lost, wandering, stationary, or deviated users • Study the applicability of path caching techniques • Deployment on our campus facilities for evaluation • URL: http://p-comp.di.uoa.gr/projects/ontonav