Tripod Localization and Sensing Testbed
Tripod Localization and Sensing Testbed. Lewis Girod. Goals of this effort. Develop a system to calibrate locations of field-deployed motes Turnkey system Deploy, use, and take down in a day Minimize restrictions on deployment Provide a convenient platform for…

Tripod Localization and Sensing Testbed
E N D
Presentation Transcript
Tripod Localization and Sensing Testbed Lewis Girod
Goals of this effort • Develop a system to calibrate locations of field-deployed motes • Turnkey system • Deploy, use, and take down in a day • Minimize restrictions on deployment • Provide a convenient platform for… • testing and evaluating new ranging techniques • Acoustic channel measurement? • Other kinds of sensing experiments?
Mote Localization Problem Motes Tripods
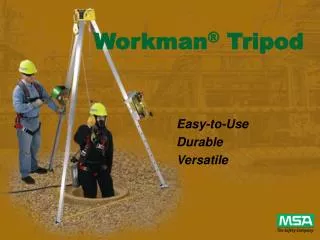
Tripod Design • Resource un-constrained design • Runs on batteries for 6 hours • Four audio channels • 4 fixed microphones • Omni-directional, 15Hz-30KHz • 1 fixed speaker with a reflector • 96 KHz / 24 bit samples • CPU • 1 GHz P3, 256 MB, 20GB Hard drive • Runs on 12V • Network • 802.11 for inter-tripod network • “MoteNIC” to talk to mote network • 3-axis orientation sensor
More detail Mica2 Mote USB 802.11 adaptor Reflector Car stereo speaker 3-axis orientation sensor from MicroStrain. May be dropped due to cost if found unnecessary. Behringer ECM8000 microphone, intended for acoustic testing. Very flat response from 15Hz to 20KHz 2x “Audiobuddy” 2 channel microphone preamp, feeding to M-Audio Delta-44 4 channel 96/24 PCI sound card. 30 cm inter-mic spacing CPU: Currently a ruggedized industrial PC from littlePC.com
Questions • Would this kind of platform be helpful to your group? • Are there additional / unnecessary features? • Is 96 KHz / 24 bit useful to you? • Microphone spacing? • Microphone preamps • Need phantom power • The one I selected runs off 9V AC • Rather have it run off a (noisy) DC supply
Mote Localization in More Detail Relative locations of motes more poorly constrained • Inter-mote ranging.. Why not? • Additional hardware and software constraints • Resource consumption • Emitter only is low-cost • How important is it? • Bi-partite geometry may leave locations of motes poorly determined • Other constraints • Bearing estimates? • Mote connectivity?
Tripod System in more Detail After motes in blue region are located, move tripods to cover green region • Grounding the coordinate system • Locate one tripod at origin position, define it as the “origin” • Will another fixed point be needed? • System feedback to user: • System can ask tripods to be moved to improve constraints • System indicates when all motes in region are located • Cover more ground by moving tripods Origin
Experimental Ranging TechniquesLeveraging Four Channels • Bearing estimates • Add constraints to multilateration • May be helpful to address bi-partite topology • Angular inconsistencies across nodes might detect obstructed signals • Computed based on detected ranges to each microphone • More sophisticated analysis might correlate mic signals
Multipath Bearing Estimation • Bearing estimates of multipath components? • Distribution of incoming paths (angle and intensity) • Might provide clue about whether path is obstructed • Cases with LOS should have much stronger direct path • Deduce location of sender in some cases? • Estimation using model of reflectors