
Segmentation parameter optimization 7/10/2012
E N D
Presentation Transcript
Segmentation parameter optimization7/10/2012 Jacob D’Avy
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Evaluation methods • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
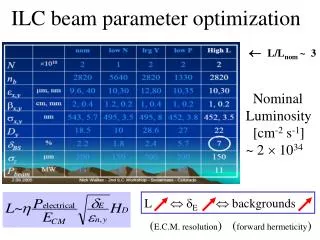
Introduction • Most image segmentation methods require parameters to be set by the user. • The quality of a segmentation depends on properly setting parameter values. • Finding appropriate parameter values for a given image is not always intuitive. • Parameter optimization simplifies the segmentation step which leads to more automated and robust image processing applications. Motivation for segmentation parameter optimization: Goal: • Efficiently navigate an N-dimensional parameter space to find a set of parameter values that minimize a segmentation objective function.
Introduction • There is no differentiable function to relate segmentation performance with parameters. • There are multiple local minima in the parameter space. • The process of segmenting and evaluating is time expensive. Challenges associated with optimization of segmentation parameters: Most existing approaches to segmentation parameter optimization use direct search methods. They have the following properties: • Derivative-free • Trial based • Iterative D. Crevier, “Image Segmentation Algorithm Development Using Ground Truth Image Datasets,” Computer Vision and Image Understanding, vol. 112, no. 2, pp. 143-159, 2008.
Introduction Parameter search Evaluate objective function Parameters Segmentation Segmented image Image The process pipeline for segmentation parameter optimization. Beginning with an initial set of parameter values, the image is segmented and the results are evaluated using an objective function. A parameter search method uses the feedback from the objective function to generate a new set of parameter values that will minimize the objective function.
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Evaluation methods • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
Segmentation parameter optimization • Tabu search Existing parameter optimization methods: D. Crevier, “Image Segmentation Algorithm Development Using Ground Truth Image Datasets,” Computer Vision and Image Understanding, vol. 112, no. 2, pp. 143-159, 2008. • Hill climbing J. Min, M. Powell, and K. Bowyer, “Automated Performance Evaluation of Range Image Segmentation Algorithms,” IEEE Transactions on Systems, Man, and Cybernetics, vol. 34, no. 1, 2004. • Genetic algorithm M. Forouzanfar, N. Forghani, M. Teshnehlab, “Parameter optimization of improved fuzzy c-means clustering algorithm for brain MR image segmentation,” Engineering Applications of Artificial Intelligence, vol. 23, pp. 160-168, 2010. These methodswork, but they have limitations: • They take a long time to reach a solution. • Their success depends on properly setting parameters that control the execution of the search. • No guarantee of finding a global minimum.
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Evaluation methods • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
Reducing search Utilize some prior knowledge about the segmentation parameters to make a more efficient search. My idea for creating a more efficient parameter search: Assumptions: • Use of a push-pull type of segmentation evaluation function which balances a region uniformity term, , with a regularizing term,. (more details are given later) • Each segmentation parameter can be assumed to have a monotonic effect on the terms and . For example, increasing a merging threshold parameter value leads to larger and less uniform regions. This will cause a monotonic decrease in the value of and an increase in the value of . A set of parameter valuesare evaluated within the parameter space. Using the assumption of monotonicity, certain regions of the parameter space can be ignored whenever it is found to be mathematically impossible for the region to contain a minimum. Reducing the search space means that fewer segmentation evaluations are required.
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Evaluation methods • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
Introduction Parameter search Evaluate objective function Parameters Segmentation Segmented image Image The process pipeline for segmentation parameter optimization.
Segmentation objective function • The evaluation function contains two counteracting terms. • Uniformity term • Regularity term • The uniformity term represents how well the pixels in a segmented region conform to some measure of homogeneity. • The regularity term indicates the organization of the segmentation which can range from a simple one containing a few large regions to a more detailed result with smaller regions. • The minimum value of gives the optimal segmentation for image . • A parameter can be used to adjust the weight of each term (scale parameter). Push-pull evaluation formulation:
Segmentation parameter classification Examples of segmentation parameters and their effect on the terms of a push-pull type evaluation function. Varying these parameters in one direction typically has a monotonically increasing or decreasing effect on the uniformity and regularizing terms. For example, increasing the minimum region size will result in larger regions. This will cause the uniformity term to increase and the regularizing term to decrease.
Segmentation objective function Example of monotonicity: Video showing segmentation as parameter k is increased. Segmentations created using Efficient Graph Based method. Evaluations are done using Visible Color Difference method. P. Felzenszwalb and D. Huttenlocher, “Efficient graph-based image segmentation,” International Journal of Computer Vision, vol. 59, no. 2, 2004 . H.C. Chen, S.J. Wang, “Visible color difference-based quantitative evaluation of colour segmentation,” IEE Proceedings of Vision, Image, and Signal Processing, 2006.
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Objective functions • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
Reducing search 1 Dimension search example: Yellow regions have been eliminated. Each set of points represents 1 segmentation of the input image Reducing the search space allows the search to concentrate on regions that are likely to contain a minimum. A total of 25 segmentations was required for this search. Objective function: Video showing the progress of a 1D Reducing search
Reducing search Segmentation result from Reduce search Segmentation result from fixed sampling. The best score is shown out of 1000 parameter combinations. (parameter k is varied from 1-10,000 by steps of 10
Reducing search 2 Dimension search example: Yellow regions have been eliminated. Each point represents 1 segmentation of the input image The color of each point indicates the value of the objective function, E, for that segmentation. A total of 85 segmentations was required for this search. Objective function: Video showing the progress of a 2D Reducing search
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Evaluation methods • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
Reducing search Summary: • Reducing search can be used to efficiently find good parameters to segment an image. • By using the monotonic relationship between segmentation parameters and the push-pull objective function terms, areas of the search space can be eliminated by determining that they can’t contain a minimum. • Adaptive sampling allows the search to concentrate on areas that are more likely to produce good results.
Outline • Introduction • Existing segmentation parameter optimization methods • Reducing search • Introduction • Objective function • Results • Summary • Appendix: Evaluation methods • Method 1: Multiscale criteria • Method 2: Entropy • Method 3: Visible Color Difference
Method 1: MSC – Multiscale criteria • The measure balances the goodness of fit to a region model with the complexity of the boundaries. • The parameter is set by the user to control the level of detail. • A lower score indicates a better segmentation. . where fit energy • complexity energy • scale parameter • normalization coefficients S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Method 1: MSC – Multiscale criteria . where max channel value for the color space of S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Method 1: MSC – Multiscale criteria . Physical interpretation: Min Max Input image Input image Maximum value occurs when every region has a checkerboard pattern of intensity values. Minimum value occurs when every region is uniform. S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Method 1: MSC – Multiscale criteria . where S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Method 1: MSC – Multiscale criteria Physical interpretation: Min Max Segmentation Segmentation Maximum value occurs when every pixel is on a region border. Minimum value occurs when the segmentation contains only 1 region. S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Method 1: MSC – Multiscale criteria . • is an integer scale parameter S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Method 1: MSC – Multiscale criteria Reformulation: S. Philipp-Foliguet, L. Guigues, “Multi-scale criteria for the evaluation of image segmentation algorithms,” J. of Multimedia, vol. 3, no. 5, pp. 42-56, Dec. 2008.
Outline • Timeline of segmentation evaluation work • Introduction • Evaluation methods • Multiscale criteria • Entropy • Visible Color Difference • Initial results • Simple image • Results on segmentation dataset • Performance evaluator analysis method • Conclusions
Method 2: E – Entropy measure • The value of is the number of bits per pixel needed to encode the intensity values in a region. • The value of is the number of bits per pixel needed to encode the region labels. For an image , an entropy based quality score is defined as: where region entropy layout entropy H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Method 2: E – Entropy measure The region entropy for the image is defined as: where the number of regions • the number of pixels in • the number of pixels in the image • region entropy For a region , the entropy is defined as: where current value of • the set of all possible values of in • the number of pixels in that have value for feature • the number of pixels in H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Method 2: E – Entropy measure Physical interpretation: Min Max Intensity in region Intensity in region The maximum value occurs when a region contains an equal amount of all possible intensity values. The minimum value occurs when a region has uniform intensity. H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Method 2: E – Entropy measure The layout entropy term is used to prevent oversegmentation: where number of regions the number of pixels in the number of pixels in the image H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Method 2: E – Entropy measure Physical interpretation: Min Max Segmentation Segmentation The maximum value occurs when a segmentation contains 1 pixel per region. The minimum value occurs when a segmentation has only 1 region. H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Method 2: E – Entropy measure The maximum possible value for depends on the bit depth of the image and the size of the image. H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Method 2: E – Entropy measure Reformulation: H. Zhang, J. Fritts, S. Goldman, “An entropy-based objective evaluation method for image segmentation,” Proc. of SPIE-Storage and Retrieval Methods and Applications for Multimedia, 2004.
Outline • Timeline of segmentation evaluation work • Introduction • Evaluation methods • Multiscale criteria • Entropy • Visible Color Difference • Initial results • Simple image • Results on segmentation dataset • Performance evaluator analysis method • Conclusions
Method 3: VCD - Visible color difference Visible color difference is an evaluation method that is based on intra-region visual errors and inter-region visual errors. Visible color difference uses the CIE L*a*b* color space. The difference between two colors is defined as: . A threshold value of is used to designate a significant color difference. H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.
Method 3: VCD - Visible color difference where original image number of regions in color vector representing pixel average color vector for region threshold for color difference H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.
Method 3: VCD - Visible color difference Physical interpretation: Min Max The maximum value occurs when every pixel in a region is in error. This means the colors in the region are highly varied. The minimum value occurs when there are no error pixels in the region. This means the colors in the region are very uniform. for all for all where color vector representing pixel average color vector for region threshold for color difference H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.
Method 3: VCD - Visible color difference where H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.
Method 3: VCD - Visible color difference Physical interpretation: Min Max The maximum value occurs when every region boundary is in error. This means there are many unnecessary edges in the image. The minimum value occurs when there are no error edges in the image. This means the segmented regions are very distinct. for all for all where average color vector for region threshold for color difference H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.
Method 3: VCD - Visible color difference * - typical useful range H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.
Method 3: VCD - Visible color difference Reformulation: H.C. Chen, S.J. Wang, “Visible colour difference-based quantitative evaluation of colour segmentation,” IEE Proc. of Vision, Image, and Signal Processing, vol. 153, no. 5, Oct. 2006.