Discrete Exterior Calculus
180 likes | 369 Vues
Discrete Exterior Calculus. More Complete Introduction. See Chapter 7 “Discrete Differential Forms for Computational Modeling” in the SIGGRAPH 2006 Discrete Differential Geometry Course Notes Notes are available from http://ddg.cs.columbia.edu , or Google “discrete differential geometry”

Discrete Exterior Calculus
E N D
Presentation Transcript
More Complete Introduction • See Chapter 7 “Discrete Differential Forms for Computational Modeling” in the SIGGRAPH 2006 Discrete Differential Geometry Course Notes • Notes are available from http://ddg.cs.columbia.edu, or Google “discrete differential geometry” • Topology, interpolation, more differential operators.
Motivation • We often work on problems where physical or geometric quantities are defined throughout space, on a surface, or on a curve. • When we discretize the geometry, where do we put those quantities? What do the numbers mean? How do we integrate and differentiate them? • DEC provides a scheme that preserves important properties and structures from continuous calculus.
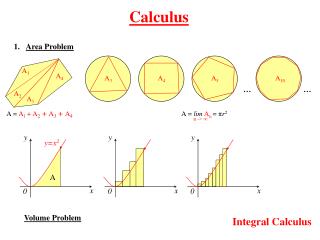
Nutshell: Integration • We discretize geometry as a simplicial complex (triangle mesh, tet mesh) with oriented faces, edges, and vertices. • Where we store quantities corresponds to how we integrate them, i.e. we integrate divergence over volumes so it goes on tets. • Quanities are “pre-integrated.” The stored divergence value on a tet is actually an integral of divergence over the tet. • Integration over a domain is an oriented sum of the numbers on the simplices composing the domain.
Nutshell: Differentiation • The discrete exterior derivative d maps the oriented sum of values on the boundary of a simplex to the simplex. • Think first fundamental theorem of calculus, Gauss’ theorem, Stokes’ theorem. • d is implemented as a matrix of 0, 1, and -1 representing the incidence of k and k+1 simplices. • For instance, it might be a matrix with |E| columns and |F| rows applied to a column vector of |E| values
Nutshell: Dual • Sometimes we have a quantity defined on simplices of one dimension that we would like to integrate on simplices of a different dimension. • The Hodge star transfers a value from a k-simplex to a dual n-k simplex, i.e. from an edge to a dual face in 3D. • The value is transformed based on the difference between the primal and dual geometry. • In the notes, the transformation is a scaling based on the ratio of primal and dual element sizes. • This can be implemented as a diagonal matrix.
Nutshell: Recap • Integration is a weighted sum, think dot product. • Differentiation goes from boundaries to simplices, think incidence matrix. • Hodge star goes from primal to dual elements with a scaling factor, think diagonal matrix.
What is a form? • A form is something ready to be integrated, f(x)dx is a form. • (Intuitively) A form is an association of a number with an oriented piece of geometry. • The dimensionality of the differential or domain of integration determines the dimensionality of the form. • 1-forms for curves, 2-forms for surfaces, etc. • Discretely, 1-form is values stored on edges, etc.
d • Flux lives on faces while divergence lives on tets. • The sum of the flux over the boundary of a volume equals the integral of the divergence over the volume. • Divergence is the discrete exterior derivative of flux. • d takes the sum of values defined on the boundary of a simplex and puts it on the simplex • d is an incidence matrix, the transpose of the boundary operator
d Does Everything • There is one d for each dimensionality of form. • d for 0-forms is gradient, d for 1-forms is curl, d for 2-forms is divergence
Hodge Star in Action • A typical 1-form might be based on the dot product of a vector field with the tangent to a curve. • A typical 2-form might be based on the dot product of a vector field with the normal to a surface. • The tangent to an edge is normal to a dual face. • The Hodge star extracts the dot product from the integral over the primal edge and reintegrates it over the dual face.
Circulation and Vorticity • The flux on a face is the integral over the face of a dot product of a velocity vector with the normal to the face. • The circulation on an edge is the integral over the edge of the dot product of the velocity vector with the tangent to the edge. • The Hodge star of flux is circulation. • In the paper, take the discrete derivative of circulation to get vorticity, which is a 2-form.