Download
1 / 1
10 likes | 219 Vues
Development of Externally Powered Lower Limb Orthosis with Bilateral-servo Actuator.

E N D
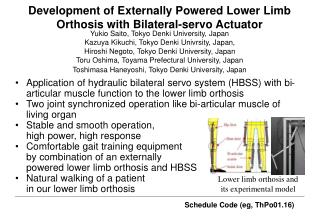
Development of Externally Powered Lower Limb Orthosis with Bilateral-servo Actuator Yukio Saito, Tokyo Denki University, JapanKazuya Kikuchi, Tokyo Denki Univrsity, Japan, Hiroshi Negoto, Tokyo Denki University, JapanToru Oshima, Toyama Prefectural University, JapanToshimasa Haneyoshi, Tokyo Denki University, Japan • Application of hydraulic bilateral servo system (HBSS) with bi-articular muscle function to the lower limb orthosis • Two joint synchronized operation like bi-articular muscle of living organ • Stable and smooth operation, high power, high response • Comfortable gait training equipmentby combination of an externally powered lower limb orthosis and HBSS • Natural walking of a patientin our lower limb orthosis Lower limb orthosis and its experimental model Schedule Code (eg, ThPo01.16)