Advanced Non-Gaussian Trackers for Enemy Course of Action Determination
This document discusses Wagner's innovative non-Gaussian trackers that model enemy target motion and optimize search effectiveness. Initially developed for submarines and surface targets, these systems now encompass ground vehicles navigating various terrains. By utilizing movement rules and detailed terrain databases, they create random sample paths and realtime probability maps reflecting potential enemy movements. The integration of Bayesian inference allows for continuous updates based on observational data, enhancing the accuracy of Course of Action predictions and ensuring effective military strategy implementation.

Advanced Non-Gaussian Trackers for Enemy Course of Action Determination
E N D
Presentation Transcript
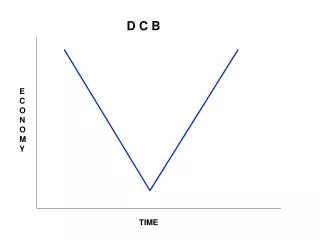
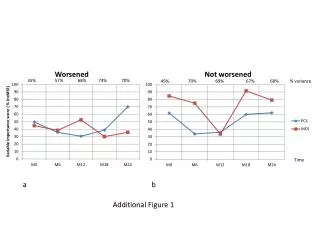
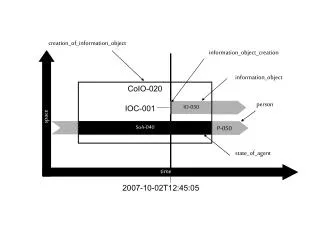
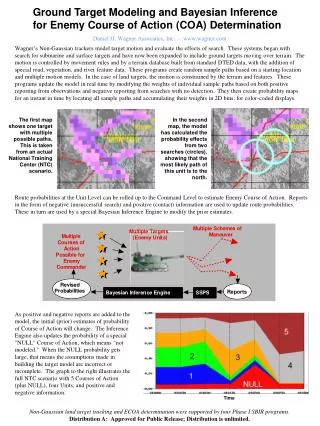
Time Ground Target Modeling and Bayesian Inference for Enemy Course of Action (COA) Determination Daniel H. Wagner Associates, Inc. - www.wagner.com Wagner’s Non-Gaussian trackers model target motion and evaluate the effects of search. These systems began with search for submarine and surface targets and have now been expanded to include ground targets moving over terrain. The motion is controlled by movement rules and by a terrain database built from standard DTED data, with the addition of special road, vegetation, and river feature data. These programs create random sample paths based on a starting location and multiple motion models. In the case of land targets, the motion is constrained by the terrain and features. These programs update the model in real time by modifying the weights of individual sample paths based on both positive reporting from observations and negative reporting from searches with no detection. They then create probability maps for an instant in time by locating all sample paths and accumulating their weights in 2D bins, for color-coded displays. The first map shows one target with multiple possible paths. This is taken from an actual National Training Center (NTC) scenario. In the second map, the model has calculated the probability effects from two searches (circles), showing that the most likely path of this unit is to the north. Route probabilities at the Unit Level can be rolled up to the Command Level to estimate Enemy Course of Action. Reports in the form of negative (unsuccessful search) and positive (contact) information are used to update route probabilities. These in turn are used by a special Bayesian Inference Engine to modify the prior estimates. As positive and negative reports are added to the model, the initial (prior) estimates of probability of Course of Action will change. The Inference Engine also updates the probability of a special "NULL" Course of Action, which means "not modeled." When the NULL probability gets large, that means the assumptions made in building the target model are incorrect or incomplete. The graph to the right illustrates the full NTC scenario with 5 Courses of Action (plus NULL), four Units, and positive and negative information. Non-Gaussian land target tracking and ECOA determination were supported by four Phase I SBIR programs. Distribution A: Approved for Public Release; Distribution is unlimited.