Innovative Touch-Sensing Robotic Hand Prototype by Eduardo Torres-Jara at MIT CSAIL
This project presents a groundbreaking prototype of a robotic hand developed by Eduardo Torres-Jara at MIT's CSAIL. It focuses on sensor-based touch sensing rather than traditional model-based approaches, allowing for real contact with the environment. Key features include high spatial resolution force sensing at the fingertips and joints, mechanical compliance, and shock resistance. The hand utilizes an array of Force Sensing Resistors (FSR) to detect pressures accurately. Controlled by DSP, this technology enhances robotic interaction while ensuring safety and adaptability in dynamic settings.

Innovative Touch-Sensing Robotic Hand Prototype by Eduardo Torres-Jara at MIT CSAIL
E N D
Presentation Transcript
A Hand Prototype Eduardo Torres-Jara CSAIL- MIT
Approach • Sensor based instead of model based • Developing touch sensing instead of vision • Real contact with the world • Less risky for environment and robot itself because of compliance
Hand Features • Force sensing at fingertips • High spatial resolution • Force sensing at joints • Mechanical compliance • Low impedance • Shock resistance
Tactile Sensors • Array of Force Sensing Resistors (FSR) • Resolution: 200 points per inch. • Report X, Y coordinates and force (7 bit res.)
Actuator Small Rotary Elastic Actuator
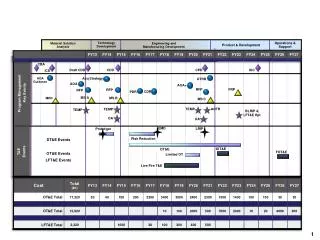
Hardware Architecture • Force actuators controlled by DSP • Tactile sensors read by PICs • Integration by DSP56F807