Enhancing Augmented Reality with Uncertain Transformations in Scene Graphs
320 likes | 344 Vues
Explore the incorporation of uncertain transformations in a scene graph to improve Augmented Reality (AR) experiences. Discover the significance of registration errors, components, limitations, and ongoing advancements in AR technology. Learn about osgAR architecture, error estimation techniques, and the utilization of multiple trackers in AR systems.

Enhancing Augmented Reality with Uncertain Transformations in Scene Graphs
E N D
Presentation Transcript
osgAR: a Scene Graph with Uncertain Transformations Enylton Machado CoelhoBlair MacIntyre Augmented Environments Lab, GVU - CoC Simon Julier Naval Research Lab
Topics • What is AR? • Registration Error • Scene graphs & osgAR • Components • Limitations • Current & future work
Augmented Reality • Augment, not replace, the physical world with computer-generated objects
AR in Maintenance • Microvision Honda trial • Access to maintenance library Reference www.microvision.com/hondatrial
AR Using Visually Coupled Head-worn Displays • Combine graphics with physical world
Registration Error • Misalignment between the computer generated graphics and the physical object
Registration Error • Commonly used approach • Better trackers • More accurate modeling and calibration • Faster computers • Not practical in real situations • Trackers may break • Knowledge will never be complete
Registration Error • Our approach • Assume errors will always exist • Estimate resulting registration errors • Use error estimates to drive the graphics • Developers concentrate on the intent of the augmentations • Decouple from tracker characteristics
Registration Error • Changing what is being displayed ameliorates the registration error LABELS
Registration Error • Once the registration error can be estimated, different augmentation techniques can be tested • Estimating the error at run time is the hard part Reference www.microvision.com/hondatrial
Topics • What is AR? • Registration Error • Scene graphs & osgAR • Components • Limitations • Current & future work
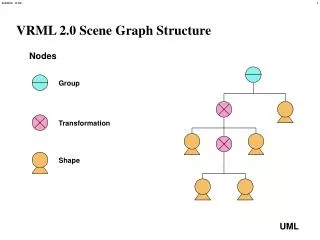
Scene Graphs • Rigid transformations • Hierarchical representation • Widely adopted • Inventor, Java3D,…
Scene Graphs with Uncertainty • Error estimates are propagated down the graph
Previous Work:Statistical Error Estimation • Individual vertices • 2D screen region Reference VR’02 –Estimating and Adapting to Registration Errors in AR Systems
osgAR:Architecture • Based on OpenSceneGraph (www.openscenegraph.org) • Extended to Augmented Reality • Support for AR • Uncertainty Reference ISMAR’04 –osgAR: A Scene Graph with Uncertain Transformations
osgAR:AR Support • Video in the background • Tracker support • VRPN • ARToolkit • 2D interface manager
osgAR:Computing the Estimate • Model the Uncertainty as a Gaussian • Adds a covariance matrix to the original 4x4 matrix transformation
Bounding Regions • Inner: Always inside the object • Outer: Contains the object BOUNDER
osgAR:Exposing the Estimate • Region: polygonal representation of the regions • Assessment: single value corresponding to the object’s registration error
osgAR:Examples of Using the Estimates • Region • Label Placer • Bounder • Assessment • LOE CALLOUTS Reference ISAR’00 –Adapting to Registration Errors Using Level of Error (LOE) Filtering
Multiple Trackers:Transformation Combiner • Multiple paths to a transform • Callback function picks which to use • Parameter: list of error estimates • Return: which path and estimate to use
Multiple Trackers:Transformation Combiner COMBINER Base Sensor Camera COMB+BOUNDER
osgAR:Architecture • AR Support • Estimate • Computation • Expose • Examples • Multiple Trackers
Observations • Should use shortest path in graph • Camera tracker • Hack: reset error at camera • Head/object tracked with same sensor • Solution: more elaborate bookkeeping/traversal • Leverage redundant information
Camera Uncertainty attached to the world attached to the camera
Pending Transforms • Transformations other then tracker transformations are updated by the system PENDING
Current and Future Work • Generic model that computes the optimal registration error estimate • Exploit the redundancy in the system • Possibility of adding interaction • Applicability and limitations of current computer graphics models
Acknowledgements • Members of the AEL and GVU for many discussions and ideas • ONR grant N000140010361 FOR MORE INFO... www.cc.gatech.edu/ael
Error Estimation • Compute statistical properties for each vertex of an object • Aggregate these estimates per object
Statistical Error Estimation(Simon Julier, NRL) • Unscented Transformation • Easy to implement • More accurate than linearization • Fast
Error Estimate Aggregation • 2D Convex Hull • Project error bounds on 2D screen • Compute convex hull
osgAR: Traversals • Optimizer • 3D uncertainty propagation • Registration error computation