Development of Mobile Robot System to Assist Handicapped Workers in Manufacturing
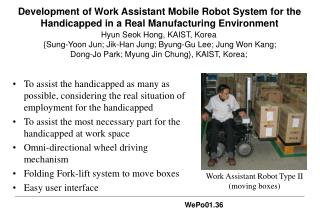
This project focuses on creating a work assistant mobile robot system designed specifically for handicapped individuals operating in real manufacturing environments. The robot features an omni-directional wheel driving mechanism and a folding fork-lift system for efficient box movement. It is developed with an easy-to-use interface to ensure accessibility for users. The aim is to enhance the employment opportunities of handicapped individuals by providing necessary assistance and facilitating their tasks in the workspace.

Development of Mobile Robot System to Assist Handicapped Workers in Manufacturing
E N D
Presentation Transcript
Development of Work Assistant Mobile Robot System for the Handicapped in a Real Manufacturing Environment Hyun Seok Hong, KAIST, Korea{Sung-Yoon Jun; Jik-Han Jung; Byung-Gu Lee; Jung Won Kang;Dong-Jo Park; Myung Jin Chung}, KAIST, Korea; • To assist the handicapped as many as possible, considering the real situation of employment for the handicapped • To assist the most necessary part for thehandicapped at work space • Omni-directional wheel driving mechanism • Folding Fork-lift system to move boxes • Easy user interface Work Assistant Robot Type II (moving boxes) WePo01.36