Download
1 / 36
360 likes | 494 Vues
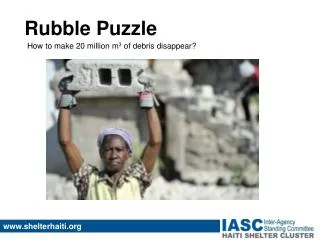
This presentation outlines the design and functionality of a next-generation Rubble Wrestling Robot aimed at enhancing urban search and rescue (USAR) operations. It discusses the robot's power sources, mobility strategies, and manipulation capabilities, integrating advanced actuation, sensor technology, and control methods. Emphasizing teleoperation, the robot is designed to locate victims, clear rubble, and assist in emergency scenarios. Key challenges and innovations in supplemental power, mobility solutions, and control interfaces are explored, highlighting its potential impact on USAR effectiveness.

E N D
What I’ll Be Talking About • Background • Objective: Design • Main Power • Tethered • Power Plant • Supplemental Power • Mobility • Physical Shape • Manipulation • Controls • Sensors • Determining Location
Background • What is Urban Search and Rescue? • Who is involved with USAR? • What do they do?
Objective • Develop design of robot • Teleoperated • For use in USAR • Capable of performing • Victim location, aid • Rubble clearing • Shoring
Tethered or Free? • With Umbilical: Easier communication, power transmission • Without Umbilical: Greater mobility
Power Plant • Batteries: Low power density • HC engine: Emissions, hazardous • Monopropellant (H2O2, etc.): Good compromise
Hydrogen Peroxide, H2O2 • Advantages • Emits H2O and O2 • Power density • Disadvantages • 1/3 energy of HC • Requires 90%+ concentration • Still developing robot actuators
Chemo-Hydraulic Actuator • Vanderbilt University • 200 lbs through a 4-inch stroke • Hydrogen peroxide • Hydroxyl ammonium nitrate • Improvements?
Supplemental Power • Required for supporting electronics • Sensors, logic, valve control, etc. • Lights, cameras, communication • Batteries • Lithium ion • Nimh • Ni-Cad • Lead acid
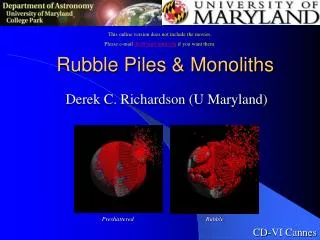
Hyper-Redundant • Howie Choset, Carnegie Melon
Snake • UC Berkeley
Cockroach • Biomimetic Robot • Rhex • UC Berkeley • McGill University • U of Michigan • Open-loop Control
RHex • Simple • Open-loop Control • Can Navigate Unstructured Terrain • High Level Operation
Combined Solution • A hybrid between the snake and cockroach • Can slither through low clearance • Has simple high-speed mobility in the open • Can navigate unstructured terrain
Physical Shape • Segmented • Combined • Snake • Roach
Rubble Manipulation • Grippers on Collapsible Arms
Controls • Individual? • Manual • Gross motor control • Fine • Pedal • Voice
Manipulator DOF • Position: • 3 DOF • Orientation: • 3 DOF • Gripper • 1 DOF • Height • 1 DOF
Haptic Interface • Each arm has 6+1DOF • Phantom from Sensable Technologies, Inc. • Adapt a hand control
Driving • Two DOF • Foot pedal • Analog or digital
Visual Feedback • 2.4 GHz transceiver • VR helmet • PIP • Augmented Reality • Hemispherical lens
Voice Recognition • PC based • High quality • CPU intensive • Stand alone (Sensory Inc.) • Emerging
Sensors • Variety • Explosive • Toxic chemical • O2 • CO2 • Temp, sound, etc. • Diminutive
Determining Location • GPS • Beacons • Dead reckoning
LCD screen for video • MEMS tilt sensor • Magnetic compass