Download
1 / 16
160 likes | 269 Vues
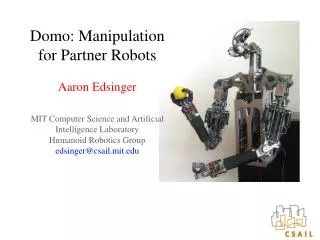
The Domo robot, developed by Aaron Edsinger at MIT's Computer Science and Artificial Intelligence Laboratory, is designed to collaboratively work alongside humans in unstructured environments. Equipped with a humanoid body, it can effectively handle everyday objects and tasks through an innovative behavior-based architecture. Featuring advanced series elastic actuators and compliant technologies, this robot prioritizes safety and efficiency, utilizing perceptual prediction models for improved manipulation. With 29 degrees of freedom, Domo is capable of learning and adapting to human-like interaction, revolutionizing humanoid robotics.

E N D
Domo: Manipulation for Partner RobotsAaron EdsingerMIT Computer Science and Artificial Intelligence LaboratoryHumanoid Robotics Groupedsinger@csail.mit.edu
Robots That Can Work Alongside Humans • Built for human environments • Safety in the human workspace • Humanoid body to work with everday objects • Perform tasks that are important to people using natural strategies with everyday objects
Creating Robust Manipulation Interactions in Unstructured Environments • Let the body assist perception • Passive compliance and force control • Highly integrated behavior-based architecture • Perceptual prediction through efference-copy models • Learn task-relevant features of objects instead of using full 3D models
29 active degrees of freedom (DOF) • Two 6 DOF force controlled arms using Series Elastic Actuators • Two 6 DOF force controlled hands using SEAs • A 2 DOF force controlled neck using SEAs • Stereo pair of Point Grey Firewire CCD cameras • Stereo Videre STH-DCSG-VAR-C Firewire cameras • Intersense 3 axis gyroscope • Two 4 DOF hands using Force Sensing Compliant (FSC) actuators • Embedded brushless and brushed DC motor drivers • 5 Embedded Motorola 56F807 DSPs running a 1khz control loop • 4 CANBus channels providing 100hz communication to external computation. • 49 potentiometers, 7 encoders, 24 tactile sensors, 12 brushless amplifiers, 17 brushed amplifiers, 12 sensor conditioners embedded on-board • An estimated 500 fabricated mechanical components and 60 electronics PCBs • 12 node Debian Linux cluster running a mixture of C/C++/Python and utilizing the Yarp and pysense robot libraries. • Weight: 42lbs. Height: 34" tall. Arm span: 5' 6" Domo
Behavior Based Architecture Arm Behaviors Head Behaviors
Series Elastic and Force Sensing Compliant Actuators • Mechanically simple • Improved stability • Shock tolerance • Highly backdrivable • Low-grade components • Low impedance at high frequencies
Passive and Active Compliance Series Elastic Actuator Force based grasping
Exploit interaction forces at the hand as an additional perceptual modality Efference Copy Model Upper 4 DOF of each arm. Sensed joint torque Sensed joint angle Jacobian relates hand forces to joint torques
Sensed torque Bimanual interaction torque • Simplified inverse dynamic model of arm • Model predicts normally occurring torques during reaching • Use the prediction to amplify the salience of interaction torques (external and bimanual) Efference Copy Model External interaction torque Mass Acceleration torque Motor torque Inverse dynamics 0 Coriolis and Centrifugal Predicted torque Known (Commanded torque) Sensed torque Commanded torque Known (von Holst, 1973)
Detection of Self-Induced Hand Forces Interaction forces at hands are approximately equal and opposite Interaction forces present Interaction forces not present
Detection of Interaction Forces Ballistic reaching: prediction error Efference copy model generates torque prediction. Torque prediction errors drive visual attention system. External forces: prediction error
Learning About Tool Use • Motion feature points for tip detection • 3D position estimation using probabilistic model