Download
1 / 8
100 likes | 287 Vues
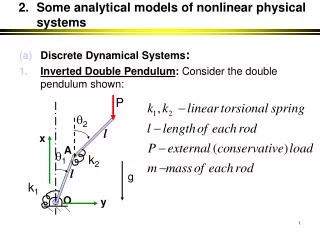
The Innoventors : Andrew Latchman Brad Panzarella. Inverted Pendulum Control. Hardware Architecture. Software Architecture. Mechanical Belt and Sprocket Control PID Electrical/Software AD PWM. Design Overview. Objectives Motion confined to a single plane

E N D
The Innoventors: Andrew Latchman Brad Panzarella Inverted Pendulum Control
Mechanical • Belt and Sprocket • Control • PID • Electrical/Software • AD • PWM Design Overview
Objectives • Motion confined to a single plane • Control unhampered by mechanism • Friction • High Speed • High Acceleration (Positive and Negative) Mechanical
PID • u(n) = u(n-1) + Kp(e(n) – e(n-1)) + Ki(e(n) + e(n-1)) + Kd(e(n) – 2*e(n-1) + e(n-2)) • Affect of Kp, Ki, Kd terms Control
Components (AD, Motor Controller) • PicBasic • Pros (ease of use) • Cons (simplified to the extreme) • PCB Design Electrical/Software
It works!!!! Enjoy Demo