Download
1 / 1
10 likes | 359 Vues
Ipad -controlled Inverted Pendulum Robot Team Gourdine : Sean C., Chris H., Hyojong L., Pablo S. Background

E N D
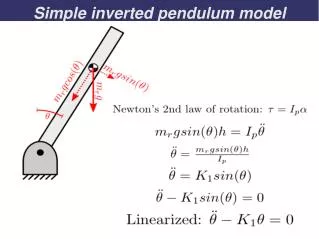
Ipad-controlled Inverted Pendulum Robot Team Gourdine: Sean C., Chris H., Hyojong L., Pablo S. Background The popularity of inverted pendulum design has sharply risen since the advent of the Segway transportation devices and the iBot, a wheelchair which can balance on two wheels and even climb up stairs. The subject stands as the basis of creating robots able to stand upright and walk as humans do. The idea of wireless controls is nothing new, but over the past few years a large increase of effort in designing and controlling unmanned drones has taken off in a huge direction. These two aspects make up the two largest parts of this project and offer a look into two largely developing fields of work as engineers. Recommendations Having a camera to send video back to the iPad proved to be infeasible. The max clock frequency of the Cerebot 32MX7ck is 80 Mhz. The frequency of our program loop is 800 Hz. This gives us 100,000 instructions to work with, or the program will be to slow to balance the robot. The amount of time it take to capture a frame from the camera and send it across the TCP connection over the Wi-Fi exceeds our instruction limit. One possible solution to this problem could be to add a second microcontroller. The first controller will have the balance algorithm, while the second controller handles the web cam reading and Wi-Fi communication. The second controller can use a one way parallel communication to send the drive states to the balance microcontroller to move it around. Impact Analysis Ethical: Our team had the chance to jail brake the iPad to make things a little easier on programming the robot. We all agreed to comply with apple regulations instead. Global: We came to find out that in the future our work could impact the development of inverted pendulum Wheelchairs technologies! Economic: To make the cost of maintaining our robot cheap, we designed ways to reduce battery power consumption Angle Measurement The angle is measured using a combination of an accelerometer and a gyroscope in what is known as a complementary filter. The accelerometer directly reads an angle and the gyroscope provides an angular velocity that is integrated and the two signals are filtered and added together to give an angle reading that is not susceptible to either low frequency or high frequency noise from the sensors. Goals The iPad Controlled Inverted Pendulum Robot is to be used as a recruiting tool for the Washington State University School of Electrical Engineering and Computer Science. The idea is to create a product that shows potential students the possibilities as an engineer and to help evoke their imaginations towards future innovations. Complementary Filter Balance The algorithm used to make the robot balance is based heavily in control theory. A basic feedback control setup is used where the current angle is fed through the system to continually tell the robot what actions to take. Lead compensator controllers are very efficient at reducing overshoot without increasing steady-state error. As a result lead compensator controller was chosen to be designed and simulated in MATLAB; whereupon the results were so encouraging it was implemented on the robot. Simulated Step Response Acknowledgment Team Gourdine would like to give special thanks to John Yates, Digilent Inc. Scott Hansen, Sandip Roy, and Professor Carl Hauser; for all your help and support. Standard Feedback Control Communication TCP protocol is being used to communicate between PIC32MX7CK and the iPad. PIC32MX7CK(part of robot) is set as the TCP server which is controlled by a provided TCP stack. The robot receives direction data using TCP protocol to control the direction of the robot. The iPad is set as the client which collects data from its built-in accelerometer and gyroscope, it then sends the data to the robot.