Download
1 / 34
420 likes | 967 Vues
Chapter 7 Steady-State Errors. 穩態誤差. 7.1 Introduction. 控制系統設計 3 規格 : Transient response 暫態反應 ( T p , T s , T r , %OS ) Stability 穩定度 Steady-state errors 穩態誤差 , e( ∞ ) System discussed: stable system only. 討論 3 類系統的 控制誤差 位置 控制 ; 等速度 控制 ; 等加速度 控制 。.

E N D
7.1 Introduction • 控制系統設計 3規格: Transient response 暫態反應 (Tp , Ts , Tr , %OS) Stability 穩定度 Steady-state errors 穩態誤差, e(∞) • System discussed: stable system only.
討論3類系統的控制誤差位置控制;等速度控制;等加速度控制。討論3類系統的控制誤差位置控制;等速度控制;等加速度控制。 Figure 7.1Test inputs for steady-state error analysis and design vary with target type
3 Inputs (即3種指令) : Step input(位置) ;Ramp input(等速度) ;Parabolic input(等加速度) 位置控制指令 等速度控制指令 等加速度控制指令 Table 7.1 Test waveforms for evaluating steady-state errors of position control systems
Figure 7.2Steady-state errore(∞)a. step input;output1: e(∞)=0output2: e(∞)=constant b. ramp inputoutput1: e(∞)=0output2: e(∞)= constantoutput3: e(∞)= ∞ unstable
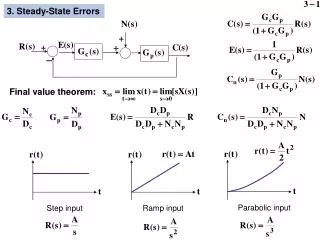
Error 定義:e(t) = Input (t) - Output (t) E(s) = R(s) – C(s) • Steady-state error 定義: e(∞) = Input (∞) - Output (∞) at time domain e(∞) = lims→0 s E(s) (by final value theorem)
Figure 7.4 e(∞) 由system configuration and input決定:a.finite steady-state error for a step input; Csteady-state = Kesteady-state K↑ esteady-state↓ esteady-state = 0 → impossible b.zero steady-state error for step input esteady-state = 0 (∵ 系統具積分器)
7.2 Steady-State Error for Unity Feedback Systems(case 1) 1/2 • E(s) = R(s) – C(s) where C (s) = G(s)E(s)→ E(s) = R(s)/(1 + G(s))註:e(∞) 由system configuration and input決定 G(s) R(s)
7.2 Steady-State Error for Unity Feedback Systems(case 1) 2/2 • E(s) = R(s) – C(s) where C (s) = G(s)E(s)→ E(s) = R(s)/(1 + G(s))→ e(∞) = lims→0 S E(s) or e(∞) = lims→0 S R(s)/(1 + G(s)) 註:Steady-State Error
7.2 Steady-State Error for Unity Feedback Systems(case 2) • E(s) = R(s) – C(s) where C (s) = T(s)R(s)→ E(s) = R(s) [1 -T(s)] → e(∞) = lims→0 S E(s) or e(∞) = lims→0 S R(s)[1 -T(s)] e(∞) 由system configuration and input決定
Figure 7.8 Feedback control system for defining system type 定義 of System Type:n=0 Type 0 systemn=1 Type 1 systemn=2 Type 2 system
※ 求 esteady-state under 3 input signals 1/4 • For step inputR(s)=1/S e(∞) = lims→0 S R(s)/(1 + G(s)) ←公式 = lims→0 S (1/S)/(1 + G(s)) = lims→01/(1 + G(s)) = 1/(1 + lims→0G(s)) if wish e(∞) = 0→ then lims→0 G(s) = ∞
※ 求 esteady-state under 3 input signals 2/4 • For step input (續) e(∞) = 1/(1 + lims→0G(s)) if wishe(∞) = 0→ thenlims→0 G(s) = ∞ lims→0 G(s) = ∞if n≧1 for • n≧1 stands for 1 integrator in the forward path i.e. system type ≧1to derive e(∞) = 0
※ 求 esteady-state under 3 input signals 3/4 • For ramp inputR(s)=1/S2 e(∞) = lims→0 S R(s)/(1 + G(s)) = lims→0 S (1/S2)/(1 + G(s)) = lims→0 1/S(1 + G(s)) = 1/lims→0SG(s) if wishe(∞) = 0→ thenlims→0SG(s) = ∞ lims→0 sG(s) = ∞if n≧2 for • n≧2 stands for 2 integrators in the forward path i.e. system type ≧2 to derive e(∞) = 0
※ 求 esteady-state under 3 input signals 4/4 • For parabolic inputR(s)=1/S3 e(∞) = lims→0 S R(s)/(1 + G(s)) = lims→0 S (1/S3)/(1 + G(s)) = lims→01/ S2(1 + G(s)) = 1/lims→0 s2G(s) if wishe(∞) = 0→ thenlims→0 s2G(s)= ∞ lims→0 s2G(s) = ∞if n≧3 for • n≧3 stands for 3 integrators in the forward path i.e. system type ≧3to derive e(∞) = 0
公式彙總 指令不同 求 esteady-state 公式不同 • For step inputR(s)=1/S e(∞) = 1/(1 + lims→0G(s)) • For ramp inputR(s)=1/S2 e(∞) = 1/ lims→0SG(s) • For parabolic inputR(s)=1/S3 e(∞) = 1/lims→0 s2G(s)
Example 7.2 不同指令下 求 esteady-state Figure 7.5 Feedback control system for system with no integrator type 0 系統 R(s) = 5u(t) = 5/S e(∞) = 5/(1 + lims→0G(s)) = 5/21 R(s) = 5tu(t) = 5/S2 e(∞) = 5/ lims→0SG(s) = 1/0 = ∞ R(s) = 5t2u(t) = 10/S3 e(∞) = 5/ lims→0 S2G(s) = 1/0 = ∞type 0系統 只能執行位置控制 產生有限誤差;無法執行速度及加速度控制
Example 7.3Figure 7.6 Feedback control system for system with no one integrator type1 系統 R(s) = 5u(t) = 5/S e(∞) = 5/(1 + lims→0G(s)) = 0 R(s)= 5tu(t) = 5/S2 e(∞) = 5/ lims→0SG(s) = 1/20 = finite R(s)= 5t2u(t) = 10/S3 e(∞) = 10/ lims→0 S2G(s) = 1/0 = ∞type 1系統 執行位置控制 無誤差產生;執行速度控制 產生有限誤差;無法執行加速度控制H.W.: Skill-Assessment Exercise 7.1
7.3 Static Error Constants and System Type • 定義: Static Error Constants Kp Kv Ka For step input R(s) = 1/s e(∞) = 1/(1 + lims→0 G(s)) = 1/1+Kp Kp = lims→0 G(s) position error constant For ramp input R(s) =1/s2 e(∞) = 1/ lims→0SG(s) = 1/Kv Kv = lims→0 SG(s) velocity error constant For parabolic input R(s) = 1/s3 e(∞) = 1/ lims→0 s2G(s) = 1/Ka Ka = lims→0 S2G(s) acceleration error constant
Example 7.4 利用Static Error Constants 求解Figure 7.7 Feedback control systems 求3系統之steady-state error? 1/3 Type 0 systemFor step input: R(s) = 1/s Kp = lims→0G(s)= 5.208e(∞) = 1/ /(1+Kp)= 0.161For ramp input: R(s) =1/s2 Kv = lims→0 sG(s) = 0 e(∞) = 1/Kv = ∞For parabolic input: R(s) = 1/s3 Ka = lims→0s2G(s)=0e(∞) = 1/Ka = ∞
Example 7.4 Figure 7.7 Feedback control systems 求3系統之steady-state error? 2/3 (b) Type 1 systemFor step input: R(s) = 1/s Kp = lims→0G(s)= ?/0 = ∞ e(∞) = 1/(1+Kp) = 0For ramp input: R(s) =1/s2 Kv = lims→0 sG(s) = 30000/960 =31.25 e(∞) = 1/Kv = 0.032For parabolic input: R(s) = 1/s3 Ka = lims→0s2G(s)=0*?=0 e(∞) = 1/Ka = ∞
Example 7.4 Figure 7.7 Feedback control systems 求3系統之steady-state error? 3/3 (c) Type 2 systemFor step input: R(s) = 1/s Kp = lims→0 G(s)= ?/0 = ∞ e(∞) = 1/ (1+Kp)= 0For ramp input: R(s) =1/s2 Kv = lims→0 sG(s) = ?/0 = ∞ e(∞) = 1/Kv = 0For parabolic input: R(s) = 1/s3 Ka = lims→0 s2G(s) = 875 e(∞) = 1/Ka = 0.00114
Table 7.2Relationships between input, system type, static error constants, and steady-state errors Static Error Constants: Kp Kv Ka 決定系統之 e(∞) ; 其可為steady-state error 之規格 H.W.: Skill-Assessment Exercise 7.2
7.4 Steady-State Error Specifications • Example 7.5 Given Kv=1000 → draw ?? conclusions 1. Stable system 2. Ramp input 3. Type 1 system
Example 7.6 Find K=? → e(∞) = 10% • Type 1 system (已知) • 有限的e(∞)→ Ramp input (已知) • e(∞) = 1/ Kv = 0.1 → Kv = 10 • Kv = lims→0 SG(s) = k*5 / 6*7*8 = 10 → k = 672 自修Skill-Assessment Exercise 7.3
7.5 Steady-State Error for Disturbances 1/3 Figure 7.11 Feedback control system showing disturbance • 2 inputs R(s) & D(s) C(s) =﹝E(s)G1(s) +D(s) ﹞G2(s) = E(s)G1(s)G2(s) +D(s)G2(s) E(s) = R(s) – C(s) →R(s) –E(s) = E(s)G1(s)G2(s) +D(s)G2(s) E(s)G1(s)G2(s) + E(s) = R(s) – D(s)G2(s) E(s)(1+G1(s)G2(s)) = R(s) – D(s)G2(s)
7.5 Steady-State Error for Disturbances 2/3 E(s)(1+G1(s)G2(s)) = R(s) – D(s)G2(s)
7.5 Steady-State Error for Disturbances 3/3 • eD(∞)↓ (分母變大) if DC gain of G1(s)↑ or DC gain of G2(s)↓ DC gain of G1(s)
Example 7.7 Fig. 7.13 如下自修 D(s) = step disturbance Find eD(∞)= ? • H.W. : Skill-Assessment Exercise 7.4
Figure 7.12Figure 7.11 system rearranged to show disturbance as input and error as output, with R(s) = 0 -C(s) = E(s)
7.7 Sensitivity • Defination Examples: 7.10 7.11 7.12 H.W. : Skill-Assessment Exercise 7.6
Example 7.11 Figure 7.19 Find Se:a = ? Se:k =? R(s) = Ramp input = 1/s2 → e(∞) = 1/kv = 1/(k/a) = a/k Se:a= ﹝a/(a/k)﹞﹝δ(a/k)/δa﹞= 1 Se:k = ﹝k/(a/k)﹞﹝δ(a/k)/δk﹞= -1